L’introduction d’une technologie appelée « Microprocesseur » a changé la façon dont nous voyons, analysons et contrôlons le monde qui nous entoure au cours des deux dernières décennies. Le premier microprocesseur commercial est 4-bit 4004 développé par Intel et a été mis à disposition en 1971.
Depuis lors, son développement et son utilisation ont connu un succès phénoménal. Le microprocesseur est considéré comme un produit de développements combinés dans les domaines de l’architecture informatique et de la fabrication de circuits intégrés (IC). Cela a rendu le concept d’informatique personnelle très réalisable.
Le microcontrôleur est souvent considéré comme un sous-produit dans le développement du microprocesseur. Le processus de fabrication et la technique de programmation qui sont responsables du développement des microprocesseurs ont également conduit au développement de microcontrôleurs.
Jusqu’à il y a une décennie, les microcontrôleurs sont moins populaires dans la communauté technique et le grand public, même si la plupart des appareils électroniques grand public comme les téléviseurs, les jeux vidéo, les magnétoscopes, les téléphones, les ascenseurs, etc. comprennent d’entre eux.
Avant de passer aux différences entre microprocesseur et microcontrôleur ou de tabuler microcontrôleur par rapport au microprocesseur, voyons la brève introduction du microprocesseur et du microcontrôleur.
Microprocesseur
Un microprocesseur, communément appelé « ordinateur sur puce » à ses débuts, est une unité de traitement centrale à usage général (CPU) fabriquée sur un seul circuit intégré (CI) et est un ordinateur numérique complet (le microcontrôleur ultérieur est considéré comme une forme plus précise d’ordinateur complet). C’est un cerveau électronique petit mais très puissant qui fonctionne à une vitesse fulgurante et est souvent utilisé pour exécuter des instructions d’un programme informatique afin d’effectuer des opérations arithmétiques et logiques, de stocker les données, de contrôler le système, d’opérations d’entrée / sortie, etc. selon les instructions. Le terme clé dans la définition d’un microprocesseur est « usage général ».
Cela signifie qu’à l’aide d’un microprocesseur, on peut construire un système simple ou une machine grande et complexe autour de lui avec quelques composants supplémentaires selon l’application. La tâche principale d’un microprocesseur est d’accepter les données en entrée des périphériques d’entrée, puis de traiter ces données selon les instructions et de fournir le résultat de ces instructions en sortie via des périphériques de sortie. Le microprocesseur est un exemple de dispositif logique séquentielle car il possède une mémoire interne et l’utilise pour stocker des instructions.
Le premier microprocesseur commercial a été publié par Intel en novembre 1971 sous le nom de 4004 (quatre mille quatre). C’est un microprocesseur 4 bits.
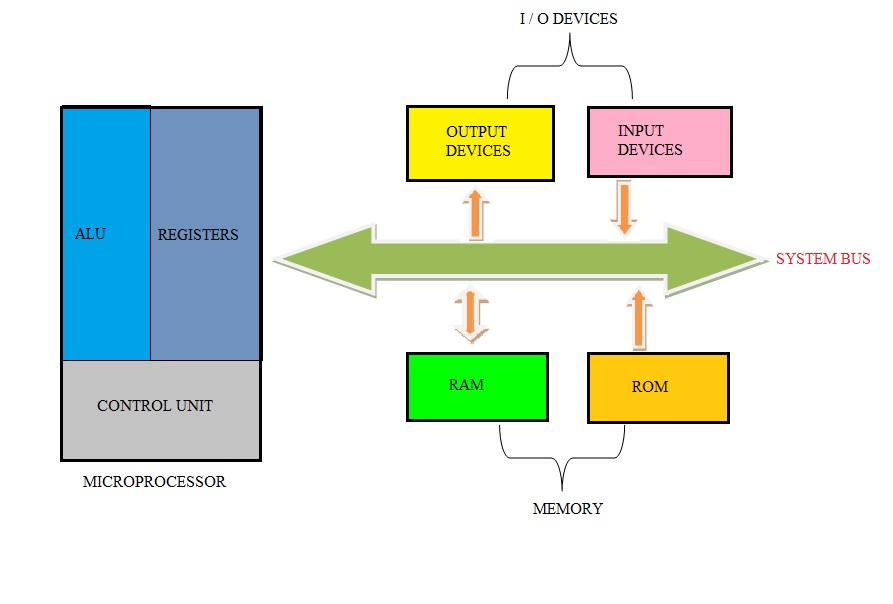
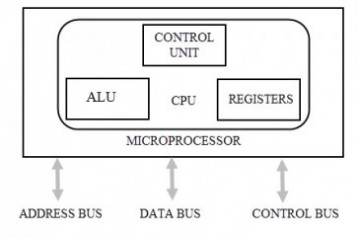
Il y a cinq composants importants dans un microprocesseur. Il s’agit d’une Unité Arithmétique et Logique (ALU), d’une Unité de Contrôle, de Registres, d’un Décodeur d’Instructions et d’un Bus de données, mais les trois premiers sont considérés comme des composants significatifs. Le schéma synoptique d’un microprocesseur avec ces composants de base est illustré ci-dessous.
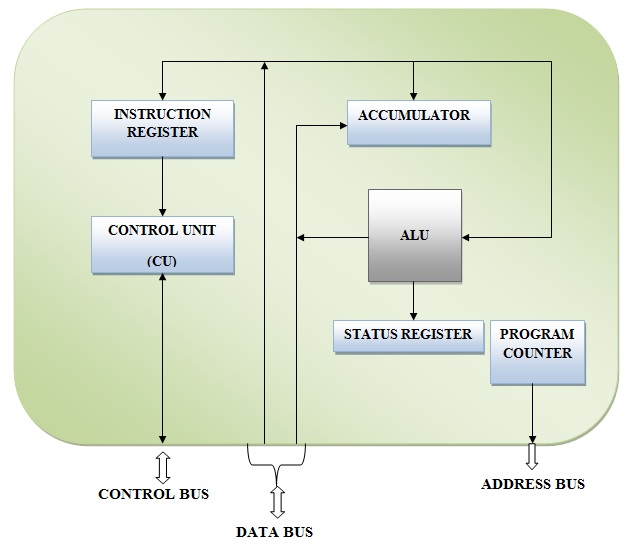
La structure interne d’un microprocesseur est illustrée ci-dessous.
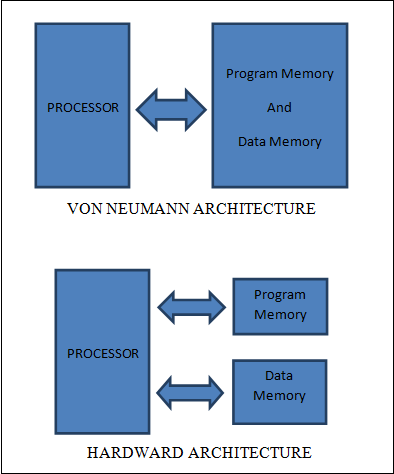
Les microprocesseurs antérieurs utilisaient l’architecture de Von Neumann où les données et les instructions (programmes) sont stockées dans la même mémoire. Même si cette architecture est simple, il y a beaucoup de reculs. L’un des inconvénients majeurs est que l’instruction et les données ne sont pas accessibles en même temps car elles partagent un seul bus de données. Cela dégrade souvent les performances globales de l’appareil. Plus tard, l’architecture Harvard est introduite qui utilise des mémoires de programme et de données séparées avec des bus séparés afin que les données et les instructions soient accessibles en même temps. Une architecture Harvard modifiée plus tard est développée dans laquelle la mémoire du programme est accessible comme s’il s’agissait de mémoire de données.
Trois caractéristiques de base sont utilisées pour différencier les microprocesseurs. Ce sont un jeu d’instructions, une bande passante et une vitesse d’horloge. Le jeu d’instructions est lié à la programmation du microprocesseur qui se compose principalement d’instructions qu’un microprocesseur peut exécuter. La bande passante indique le nombre maximal de bits traités dans une seule instruction. La vitesse d’horloge ne donne pas. d’instructions qu’un processeur peut exécuter par seconde. Habituellement, la vitesse d’horloge est en MHz (Méga Hertz) ou en GHz (Giga Hertz). Généralement, les caractéristiques de la bande passante et de la vitesse d’horloge sont examinées ensemble. Plus les valeurs de ces deux caractéristiques sont élevées, plus le processeur est puissant.
Le jeu d’instructions ou l’architecture de jeux d’instructions (ISA) joue également un rôle important dans la conception et le fonctionnement d’un processeur. Les microprocesseurs sont classés en tant que CISC (Computer à jeu d’Instructions Complexe) ou RISC (Computer à Jeu d’Instructions Réduit).
L’architecture CISC consiste en un ensemble complet d’instructions complexes, plus grandes, plus puissantes, etc. Une seule instruction CISC peut être utilisée pour exécuter plusieurs opérations de bas niveau, des opérations en plusieurs étapes et plusieurs modes d’adressage. Le temps d’exécution de ces instructions est long. Le X86 d’Intel est un exemple d’architecture CISC.
L’architecture RISC a été développée en réalisant qu’au lieu d’utiliser un ensemble complet d’instructions, seules les instructions fréquemment utilisées sont suffisantes. Dans cette architecture, les instructions sont petites et hautement optimisées. Les processeurs RISC sont utilisés lorsque le temps d’exécution de l’instruction doit être inférieur et le coût de développement inférieur. Les dispositifs ARM sont basés sur l’architecture ARM qui est un sous-ensemble de RISC.
Microcontrôleur
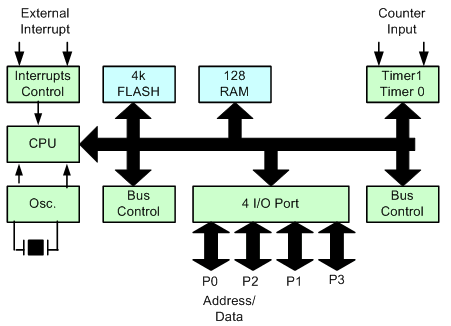
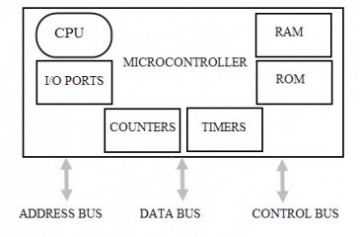
La principale raison du développement du microcontrôleur est de surmonter le seul inconvénient du microprocesseur. Même si les microprocesseurs sont des appareils puissants, ils nécessitent des puces externes telles que la RAM, la ROM, les ports d’entrée / sortie et d’autres composants afin de concevoir un système de travail complet. Cela a rendu économiquement difficile le développement d’appareils grand public informatisés à grande échelle car le coût du système est très élevé. Les microcontrôleurs sont les périphériques qui correspondent réellement au profil « Ordinateur sur puce » car il se compose d’une unité de traitement principale ou d’un processeur avec d’autres composants nécessaires pour en faire un ordinateur complet. Les composants présents sur un circuit intégré de microcontrôleur typique sont le processeur, la mémoire, les ports d’entrée / sortie et les minuteries. Le premier microcontrôleur a été développé en 1971 par Texas Instruments et s’appelle TMS 1000. Il a été mis à disposition pour un usage commercial en 1974. Le schéma synoptique d’un microcontrôleur est illustré ci-dessous.
Les microcontrôleurs sont essentiellement utilisés dans les systèmes embarqués. Le contrôle informatisé ou numérique des appareils est rendu plausible avec le développement des microcontrôleurs. Le processus de développement du microcontrôleur est similaire à celui d’un microprocesseur.
Les microcontrôleurs peuvent être classés en fonction de la largeur du bus, de la structure de la mémoire et du jeu d’instructions. La largeur du bus indique la taille du bus de données. Les microcontrôleurs peuvent être classés en 8 bits, 16 bits ou 32 bits en fonction de la largeur du bus. Des largeurs de bus plus élevées entraînent souvent de meilleures performances. Les microcontrôleurs peuvent être divisés en deux types en fonction de leurs structures de mémoire: la mémoire intégrée et la mémoire externe. Dans le cas de microcontrôleurs à mémoire intégrée, les données et la mémoire de programme requises sont intégrées dans le circuit intégré. Alors que les microcontrôleurs de mémoire externe n’ont pas de mémoire de programme intégrée et nécessitent une puce externe pour cela. Maintenant, tous les microcontrôleurs sont des microcontrôleurs de mémoire intégrés. La classification basée sur le jeu d’instructions est similaire à celle d’un microprocesseur. Ils peuvent être CISC ou RISC. La majorité des microcontrôleurs suivent l’architecture CISC avec plus de 80 instructions. Les microcontrôleurs peuvent également être divisés en fonction de leur architecture informatique en von Neumann et Harvard.
Le tableau suivant illustre certaines des différences entre les microprocesseurs et les microcontrôleurs.
 |
 |
| Le microprocesseur assimile la fonction d’une unité centrale de traitement (CPU) à un seul circuit intégré (IC). | Le microcontrôleur peut être considéré comme un petit ordinateur qui possède un processeur et quelques autres composants afin d’en faire un ordinateur. |
| Les microprocesseurs sont principalement utilisés dans la conception de systèmes à usage général, des systèmes petits aux grands et complexes tels que les super ordinateurs. | Les microcontrôleurs sont utilisés dans les appareils à commande automatique. |
| Les microprocesseurs sont des composants de base des ordinateurs personnels. | Les microcontrôleurs sont généralement utilisés dans les systèmes embarqués |
| La capacité de calcul du microprocesseur est très élevée. Par conséquent, peut effectuer des tâches complexes. | Moins de capacité de calcul par rapport aux microprocesseurs. Habituellement utilisé pour des tâches plus simples. |
| Un système à microprocesseur peut effectuer de nombreuses tâches. | Un système basé sur un microcontrôleur peut effectuer une seule ou très peu de tâches. |
| Les microprocesseurs ont un coprocesseur mathématique intégré. Les calculs mathématiques complexes qui impliquent une virgule flottante peuvent être effectués avec une grande facilité. | Les microcontrôleurs n’ont pas de coprocesseurs mathématiques. Ils utilisent un logiciel pour effectuer des calculs en virgule flottante, ce qui ralentit l’appareil. |
| La tâche principale du microprocesseur est d’effectuer le cycle d’instructions à plusieurs reprises. Cela inclut la récupération, le décodage et l’exécution. | En plus d’effectuer les tâches de récupération, de décodage et d’exécution, un microcontrôleur contrôle également son environnement en fonction de la sortie du cycle d’instructions. |
| Pour construire ou concevoir un système (ordinateur), un microprocesseur doit être connecté en externe à d’autres composants tels que la mémoire (RAM et ROM) et les ports d’entrée / sortie. | Le circuit intégré d’un microcontrôleur comporte de la mémoire (RAM et ROM) intégrée avec d’autres composants tels que des périphériques d’E / S et des minuteries. |
| Le coût global d’un système construit à l’aide d’un microprocesseur est élevé. Cela est dû à l’exigence de composants externes. | Le coût d’un système construit à l’aide d’un microcontrôleur est moindre car tous les composants sont facilement disponibles. |
| Généralement, la consommation d’énergie et la dissipation sont élevées en raison des périphériques externes. Par conséquent, il nécessite un système de refroidissement externe. | La consommation d’énergie est moindre. |
| La fréquence d’horloge est très élevée généralement de l’ordre du Giga Hertz. | La fréquence d’horloge est moins généralement de l’ordre du Méga Hertz. |
| Le débit d’instructions est donné une priorité plus élevée que la latence d’interruption. | En revanche, les microcontrôleurs sont conçus pour optimiser la latence des interruptions. |
| Avoir peu d’instructions de manipulation de bits | La manipulation de bits est une fonctionnalité puissante et largement utilisée dans les microcontrôleurs. Ils ont de nombreuses instructions de manipulation de bits. |
| Généralement, les microprocesseurs ne sont pas utilisés dans les systèmes temps réel car ils dépendent fortement de plusieurs autres composants. | Les microcontrôleurs sont utilisés pour gérer des tâches en temps réel car ils sont des périphériques programmés, autonomes et orientés tâches. |
En mettant de côté les différences entre le microprocesseur et le microcontrôleur, il est clair qu’un microprocesseur ne peut pas remplacer un microcontrôleur et inversement. Les deux technologies ont leur mode d’utilisation unique dans les applications.