“マイクロプロセッサ”と呼ばれる技術の導入は、過去二十年にわたって私たちを取り巻く世界を見、分析し、制御する方法を変えました。 最初の商用マイクロプロセッサは、インテルが開発した4ビット4004であり、1971年に利用可能になった。
それ以来、それはその開発と使用において驚異的な成功を収めました。 マイクロプロセッサは,計算機アーキテクチャと集積回路(I c)製造の分野における複合開発の産物と考えられている。 それはパーソナルコンピューティングの概念を非常に実現可能にしました。
マイクロコントローラは、多くの場合、マイクロプロセッサの開発の副産物として考えられています。 マイクロプロセッサの開発に関与する製造プロセスとプログラミング技術もマイクロコントローラの開発につながっている。
十年前まで、マイクロコントローラは、テレビ、ビデオゲーム、ビデオカセットレコーダー、電話、エレベーターなどの家電製品のほとんどにもかかわらず、技術コミュニティ それらを構成する。
マイクロプロセッサとマイクロコントローラの違いやマイクロコントローラとマイクロプロセッサの表に行く前に、マイクロプロセッサとマイクロコントローラの簡単な紹介を見てみましょう。
マイクロプロセッサ
マイクロプロセッサは、初期の”computer on a chip”として一般に知られており、単一の集積回路(IC)上に製造された汎用中央処理ユニット(CPU)であり、完全なデジタルコンピュータである(後のマイクロコントローラは、より正確な完全なコンピュータの形態であると考えられている)。 それは水ぶくれの速度で作動し、データ、システム制御、入出力操作等を貯える算術および論理演算を行うために計算機プログラムの指示を遂行する 指示に従って。 マイクロプロセッサの定義における重要な用語は、”汎用”です。
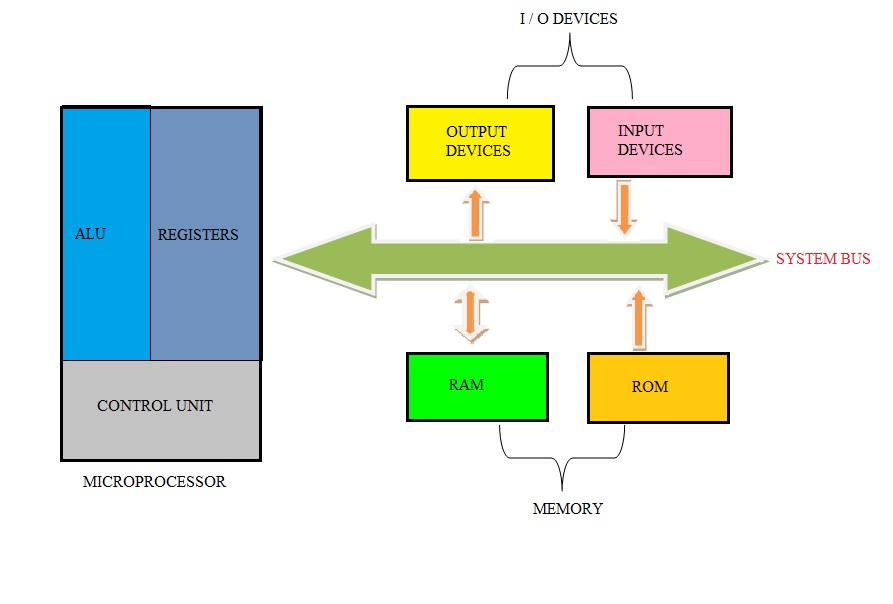
これは、マイクロプロセッサの助けを借りて、アプリケーションごとにいくつかの余分なコンポーネントを備えた単純なシステムまたはその周りに大規模で複雑なマシンを構築できることを意味します。 マイクロプロセッサの主なタスクは、入力デバイスからの入力としてデータを受け取り、命令に従ってこのデータを処理し、これらの命令の結果を出力デ マイクロプロセッサは、内部的にメモリを持ち、命令を格納するためにそれを使用するシーケンシャルロジックデバイスの一例である。
最初の商用マイクロプロセッサは1971年にIntelによってリリースされ、4004(four–thousand–four)と命名された。 それは4ビットマイクロプロセッサです。
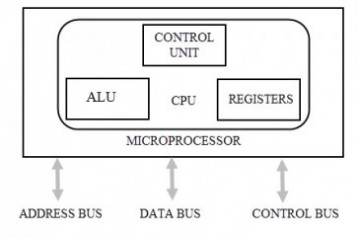
マイクロプロセッサには5つの重要なコンポーネントがあります。 それらは、算術および論理ユニット(ALU)、制御ユニット、レジスタ、命令デコーダ、およびデータバスであるが、最初の3つは重要な構成要素と考えられている。 これらの基本的なコンポーネントを備えたマイクロプロセッサのブロック図を以下に示します。
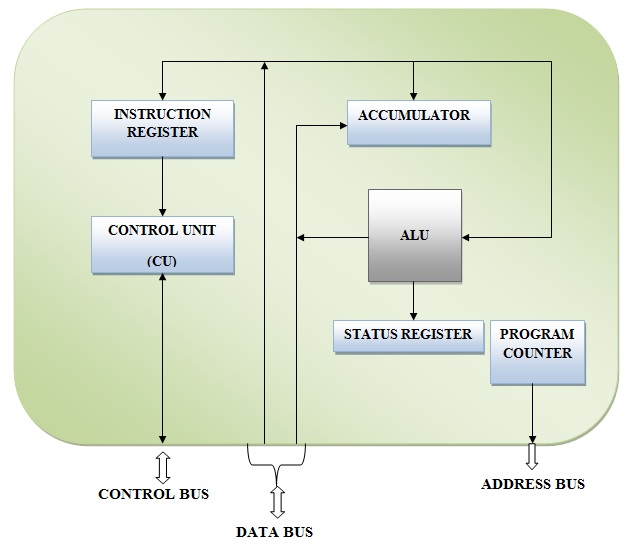
マイクロプロセッサの内部構造を以下に示します。
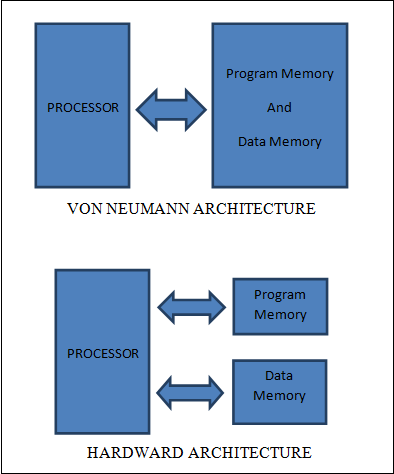
以前のマイクロプロセッサは、データと命令(プログラム)が同じメモリに格納されるVon Neumannアーキテクチャを利用していました。 このアーキテクチャは単純ですが、多くのドローバックがあります。 主な欠点の1つは、命令とデータが単一のデータバスを共有するため、同時にアクセスできないことです。 これにより、デバイスの全体的なパフォーマンスが低下することがよくあります。 その後,データと命令の両方に同時にアクセスできるように,別々のバスで別々のプログラムとデータメモリを利用するハーバードアーキテクチャが導入された。 後に改良されたハーバードアーキテクチャは、プログラムメモリがデータメモリであるかのようにアクセスされるように開発されている。
マイクロプロセッサを区別するために使用される三つの基本的な特性があります。 それらは命令セット、帯域幅およびクロック速度です。 命令セットは、主にマイクロプロセッサが実行できる命令で構成されるマイクロプロセッサのプログラミングに関連している。 帯域幅は、単一の命令で処理される最大ビット数を示します。 クロック速度は与えません。 プロセッサが毎秒実行できる命令の。 通常、クロック速度はMHz(メガヘルツ)またはGHz(ギガヘルツ)です。 一般的に、特性帯域幅とクロック速度は一緒に見られます。 これらの両方の特性の値が高いほど、プロセッサはより強力になります。
命令セットまたは命令セットアーキテクチャ(ISA)も、プロセッサの設計と機能において重要な役割を果たします。 マイクロプロセッサは、CISC(Complex Instruction Set Computer)またはRISC(Reduced Instruction Set Computer)のいずれかに分類されます。
CISCアーキテクチャは、複雑で、より大きく、より多くの計算能力を持つ命令の完全なセットで構成されています。 単一のCISC命令を使用して、複数の低レベル操作、マルチステップ操作、および複数のアドレッシングモードを実行できます。 これらの命令の実行時間は長いです。 インテルのX86は、CISCアーキテクチャの一例です。
RISCアーキテクチャは、完全な命令セットを使用するのではなく、頻繁に使用される命令だけで十分であることを実現することによって開発されました。 このアーキテクチャでは、命令は小さく、高度に最適化されています。 RISCプロセッサは、命令の実行時間が短く、開発コストが低い場合に使用されます。 ARMデバイスは、RISCのサブセットであるARMアーキテクチャに基づいています。
マイクロコントローラ
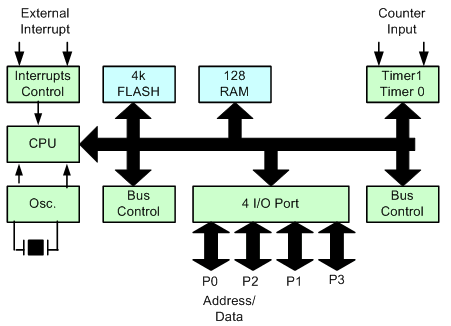
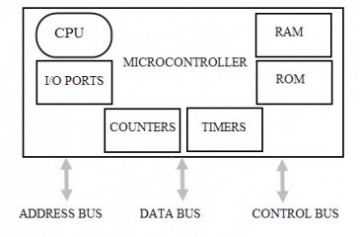
マイクロコントローラの開発の主な理由は、マイクロプロセッサの唯一の欠点を克服することです。 マイクロプロセッサは強力な装置であるのに、完全な働くシステムを設計するためにRAM、ROM、入出力港および他の部品のような外的な破片を要求する。 これにより、システムコストが非常に高いため、コンピュータ化された家電製品を大規模に開発することは経済的に困難になりました。 マイクロコントローラは、それが完全なコンピュータにするために必要ないくつかの他のコンポーネントと一緒に主な処理ユニットまたはプロセッサで構成されているように、実際にプロファイル”コンピュータ*オン*チップ”に合うデバイスです。 典型的なマイクロコントローラIC上に存在するコンポーネントは、CPU、メモリ、入出力ポート、およびタイマです。 最初のマイクロコントローラは1971年にテキサス-インスツルメンツによって開発され、TMS1000と呼ばれています。 それは1974年に商業的な使用のために利用可能にされました。 マイクロコントローラのブロック図を以下に示します。
マイクロコントローラは、基本的に組み込みシステムで使用されています。 マイクロコントローラの開発により,デバイスのコンピュータ化またはデジタル制御がもっともらしくなった。 マイクロコントローラの開発プロセスは、マイクロプロセッサの開発プロセスに似ています。
マイクロコントローラは、バス幅、メモリ構造、命令セットに基づいて分類することができます。 バス幅は、データバスのサイズを示します。 マイクロコントローラは、バス幅に基づいて8ビット、16ビット、または32ビットに分類できます。 バス幅が高いほど、性能が向上することがよくあります。 マイクロコントローラは、そのメモリ構造に基づいて、組み込みメモリと外部メモリの二つのタイプに分けることができます。 内蔵メモリマイコンの場合、必要なデータとプログラムメモリがICに埋め込まれます。 外部メモリマイクロコントローラは、それらの上に埋め込まれたプログラムメモリを持っていないと同じために外部チップを必要とするのに対し。 今日では、すべてのマイクロコントローラは、組み込みメモリのマイクロコントローラです。 命令セットに基づく分類は、マイクロプロセッサの分類に似ています。 CISCまたはRISCのいずれかになります。 マイクロコントローラの大部分は、80以上の命令を持つCISCアーキテクチャに従っています。 マイクロコントローラは、コンピュータアーキテクチャに基づいてvon NeumannとHarvardに分けることもできます。
次の表は、マイクロプロセッサとマイクロコントローラの違いのいくつかを示しています。
 |
 |
| マイクロプロセッサは、単一の集積回路(IC)に中央処理装置(CPU)の機能を同化します。 | マイクロコントローラは、それをコンピュータにするためにプロセッサといくつかの他のコンポーネントを持つ小型コンピュータと考えることができます。 |
| マイクロプロセッサは、主にスーパーコンピュータのような小型から大型、複雑なシステムまでの汎用システムの設計に使用されています。 | マイクロコントローラは、自動的に制御されるデバイスに使用されます。 |
| マイクロプロセッサはパーソナルコンピュータの基本的な構成要素である。 | マイクロコントローラは、一般的に組み込みシステムで使用されています |
| マイクロプロセッサの計算能力は非常に高い。 したがって、複雑なタスクを実行することができます。 | マイクロプロセッサと比較して計算能力が低い。 通常より簡単な仕事のために使用されて。 |
| マイクロプロセッサベースのシステムは、多数のタスクを実行できます。 | マイクロコントローラベースのシステムは、単一または非常に少数のタスクを実行できます。 |
| マイクロプロセッサは数学コプロセッサを統合している。 浮動小数点を含む複雑な数学的計算は非常に簡単に実行することができます。 | マイクロコントローラには数学コプロセッサがありません。 彼らは、デバイスを遅く浮動小数点計算を実行するためのソフトウェアを使用しています。 |
| マイクロプロセッサの主なタスクは、命令サイクルを繰り返し実行することです。 これには、フェッチ、デコード、および実行が含まれます。 | マイクロコントローラは、フェッチ、デコード、実行のタスクを実行するだけでなく、命令サイクルの出力に基づいて環境を制御します。 |
| システム(コンピュータ)を構築または設計するためには、マイクロプロセッサをメモリ(RAMおよびROM)および入出力ポートのようないくつかの他のコンポーネ | マイクロコントローラのICには、I/Oデバイスやタイマなどの他のコンポーネントと一緒にメモリ(RAMとROMの両方)が内蔵されています。 |
| マイクロプロセッサを使用して構築されたシステムの全体的なコストは高いです。 これは外付け部品が必要なためです。 | マイクロコントローラを使用して構築されたシステムのコストは、すべてのコンポーネントが容易に利用可能であるため、少なくなります。 |
| 一般にパワー消費量および消滅は外部デバイスのために高いです。 それ故にそれは外的な冷却装置を要求します。 | 消費電力が少なくなります。 |
| クロック周波数は、通常ギガヘルツのオーダーで非常に高いです。 | クロック周波数は通常、メガヘルツのオーダーではありません。 |
| 命令スループットは割込みレイテンシよりも優先されます。 | これとは対照的に、マイクロコントローラは割り込みレイテンシを最適化するように設計されています。 |
| いくつかのビット操作命令を持っている | ビット操作は、マイクロコントローラで強力で広く使用されている機能です。 それらは多数のビット操作命令を持っています。 |
| 一般的にマイクロプロセッサは、他のいくつかのコンポーネントに大きく依存しているため、実時間システムでは使用されません。 | マイクロコントローラは、単一のプログラムされ、自給自足でタスク指向のデバイスであるため、リアルタイムタスクを処理するために使用されます。 |
マイクロプロセッサとマイクロコントローラの違いは別として、マイクロプロセッサがマイクロコントローラを置き換えることはできず、その逆もまた同様であることは明らかです。 技術の両方の部分は、アプリケーションでの使用の独自の方法を持っています。
« zip2