楕円軌道のように、与えられたシステムの双曲線軌道は、その半長軸と離心率によって(向きを無視して)定義することができます。 しかし、双曲線軌道では、体の動きを理解する上で他のパラメータがより有用である可能性があります。 次の表は、標準的な仮定とそれらを接続する式の下で別の周りの双曲線軌道に続く体のパスを記述する主なパラメータを示しています。
これらの式は不正確な可能性があります。 追加の参照が必要です。
| 要素 | シンボル | 式 | v∞{\displaystyle v_{\infty}}
 (またはa{\displaystyle a}  ), とb{\displaystyle b}  |
|---|---|---|---|
| 標準重力パラメータ | μ{\displaystyle\mu\,}
 |
v2(2/r−1/a){\displaystyle{\frac{v^{2}}{(2/r−1/a)}}{(2/r−1/a)}}{(2/r−1/a)})}}}
 |
b v∗2cot∗{\displaystyle BV_{\infty}^{2}\Cot\theta_{\infty}}}}
 |
| 偏心(>1) | e{\displaystyle e{\displaystyle e}}}
 |
σ r p−1{\displaystyle{\frac{\ell}{r_{p}}}}{\displaystyle{\frac{\ell}{r_{p}}}}}}}-1}
 |
1 + b2/a2{\displaystyle{\sqrt{1+b^{2}/a}}}{\displaystyle{\sqrt{1+b^{2}/a}}}^{2}}}}
 |
| 半長軸(<0) | a {\displaystyle a\,\!}
 |
1 / ( 2 / r-v2/μ){\displaystyle1/(2/r-v^{2}/\mu)}{\displaystyle1/(2/r-v^{2}/\mu)}{\displaystyle)}
 |
− μ|v≤2{\displaystyle-\mu|v_{\infty}}}^{2}}
 |
| 双曲線超過速度 | v∞{\displaystyle v_{\infty}}
|
− μ|a{\displaystyle{\sqrt{-\mu|a}}}|a{\displaystyle{\sqrt{-\mu}}}}}}
 |
|
| (外部)間の角度 漸近線 | 2π{\displaystyle2\theta_{\infty}}}}
 |
2 cos−1π(-1/e){\displaystyle2\cos^{-1}(-1/e)})}
 |
π+2tan−1π(b/a){\displaystyle\pi+2\tan^{-1}(b/a)})}
 |
| アプローチの双曲線パスの漸近線と共役軸 の間の角度 |
2π{\displaystyle2\nu}
 |
2π−π{\displaystyle2\theta_{\infty}-\pi}
 |
2 sin−1(1(1+r p≤v≤2|μ)){\displaystyle2\sin^{-1}{\bigg(}{\frac{1}{(1+r_{p}*v_{\infty}/{2}|\mu)}}{\bigg)}}
 |
| 衝撃パラメータ(半短軸) | b{\displaystyle b}
|
− a e2−1{\displaystyle-a{\sqrt{e}}}{\displaystyle-a{\sqrt{e}}}^{2}-1}}}
 |
|
| セミラトゥス |
 |
and(e2−1){\displaystyle a(e)}{\displaystyle a(e)}{\displaystyle a(e^{2}-1)}
 |
− b2|a=h2|μ{\displaystyle-b^{2}|a=h^{2}|\mu}
{\displaystyle-b^{2}|a=h^{2}|\mu}
{\displaystyle-b^{2}|a=h^{2}|\mu}
{\displaystyle-b^{2}|a=h^{2}|\mu}
|
| ペリアプシス距離 | r p{\displaystyle r_{p}}
 |
and(1−e){\displaystyle a(1-e)}
 |
a2+b2+a{\displaystyle{\sqrt{a^{2}+b^{2}}}+a}
 |
| 特定の軌道エネルギー | ε{\displaystyle\varepsilon}
 |
− μ/2a{\displaystyle-\mu/2a}
{\displaystyle-\mu/2a}
{\displaystyle-\mu/2a}
|
v≤2/2{\displaystyle v_{\infty}}}^{2}/2}
 |
| 特定の角運動量 | h{\displaystyle h}
 |
∞{\displaystyle{\sqrt{\mu\ell}}}{\displaystyle{\sqrt{\mu\ell}}}}}}
 |
b v∈{\displaystyle bv_{\infty}}}}
 |
半長軸、エネルギーおよび双曲線過剰速度編集
も参照:特性エネルギー
半長軸(a{\displaystyle a\,\!}
)は双曲線軌道ではすぐには見えませんが、2つの漸近線が交差する点までの距離であるために構成できます。 通常、慣例により、楕円軌道と一貫性のある様々な方程式を維持することは、負である。
半長軸は、特定の軌道エネルギー(ε{\displaystyle\epsilon{\displaystyle\epsilon})に直接リンクされている。\,}

)または特性エネルギー C3{\displaystyle C_{3}}

、距離が無限大になるにつれて物体が到達する速度、双曲線過剰速度(v∞{\displaystyle v_{\infty}\,\!}

). v∞2=2∞=C3=−∞|a{\displaystyle v_{\infty}/{2}=2\epsilon=C_{3}=-\mu|a}

またはa=−∞|v∞2{\displaystyle a=-{\mu|{v_{\infty}}}}^{2}}}}

ここで、μ=G m{\displaystyle\mu=Gm\,\!}

は標準的な重力パラメータであり、C3{\displaystyle C_{\displaystyle C_{\displaystyle C_{\displaystyle C_{\displaystyle c_{\displaystyle c_{3}}
は特徴的なエネルギーであり、惑星間ミッションの計画で一般的に使用されます
双曲線軌道の場合は総エネルギーが正であるのに対し、楕円軌道の場合は負であることに注意してください。
離心率と接近と出発の間の角度編集
双曲線軌道を持つ軌道離心率(e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e{\displaystyle e}})\,}

)は1より大きい。 偏心は、漸近線間の角度に直接関係しています。 離心率がちょうど1を超えると、双曲線は鋭い”v”形状になります。 E=2{\displaystyle e={\sqrt{\displaystyle e={\sqrt}}}で{2}}}

漸近線は直角です。 E>2{\displaystyle e>2}

漸近線は120°以上離れており、周角距離は半長軸よりも大きい。 離心率がさらに増加するにつれて、運動は直線に近づく。
周角の方向と中心体からの漸近線との間の角度は、距離が無限大(θ{\displaystyle\theta_{\infty}})になる傾向があるため、真の異常である}\,}

), だから2π{\displaystyle2\theta_{\infty}}}\,}

は、接近方向と出発方向(漸近線間)の間の外角です。 このとき、θ=cos−1θ(−1/e){\displaystyle\theta{_{\infty}}=\cos^{-1}(−1/e)}となる。)\,}

あるいはe=−1/cos θ{\displaystyle e=-1/\cos\theta{_{\infty}}}{\displaystyle e=-1/\cos\theta{_{\infty}}}である。}}\,}

インパクトパラメータと最接近距離の編集
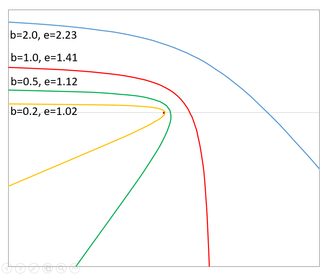
双曲線軌道に続いて、同じ双曲線過剰速度(および半長軸(=1))を持つ中心物体(小さな点)に接近する物体および同じからの物体が続く 異なった影響変数および突飛性の方向しかし。 黄色の線は確かに中央の点の周りを通過し、密接に近づいています。
衝撃パラメータは、身体が摂動されていない経路を続けた場合、その最も近いアプローチで中央の身体を逃す距離です。 重力を経験し、双曲線軌道に続く物体では、双曲線の半短軸に等しい。
宇宙船や彗星が惑星に近づいている状況では、衝撃パラメータと過剰速度が正確にわかります。 中央の体が知られている場合、接近する体が周囲にどれくらい近いかを含めて、軌道を見つけることができます。 これが惑星の半径よりも小さい場合、衝撃が予想されるべきである。 最も近いアプローチの距離、または周囲の距離は、次のように与えられます:
r p=−a(e−1)=μ|v≤2(1+(b v≤2|μ)2−1){\displaystyle r_{p}=-a(e−1)=\mu|v{_{\infty}}2{2}({\sqrt{1+(bv{_{\infty}}/{2}|\mu)^{2}}}-1)}

したがって、彗星が地球に接近する場合(有効半径〜6400km)、速度は12です。5km/s(太陽系外から来る物体のおおよその最小接近速度)は、地球との衝突を避けるためであり、衝突パラメータは少なくとも8600km、または地球の半径より34% 太陽系外から木星(半径70000km)に5.5km/hの速度で接近する天体は、衝突を避けるために少なくとも770,000kmまたは木星半径の11倍の衝撃パラメータが必
中心体の質量が不明な場合、その標準的な重力パラメータ、したがってその質量は、衝突パラメータと接近速度とともに小さい体のたわみによって決定 通常、これらの変数はすべて正確に決定できるため、宇宙船のフライバイは体の質量の良い推定値を提供します。
λ=b v≤2tan≤δ/2{\displaystyle\mu=bv_{\infty}2{2}\tan\delta/2}
{\ここで、δ=2π−π{\displaystyle\delta=2\theta_{\infty}-\pi}

は、小さい方の体がその過程で直線から偏向される角度である。