wprowadzenie technologii zwanej „mikroprocesorem” zmieniło sposób, w jaki postrzegamy, analizujemy i kontrolujemy otaczający nas świat w ciągu ostatnich dwóch dekad. Pierwszym komercyjnym mikroprocesorem jest 4-bitowy 4004 opracowany przez firmę Intel i udostępniony w 1971 roku.
od tego czasu odniósł fenomenalny sukces w jego rozwoju i użytkowaniu. Mikroprocesor jest uważany za produkt połączonych osiągnięć w dziedzinie architektury komputerowej i produkcji układów scalonych (IC). To sprawiło, że koncepcja komputerów osobistych jest bardzo wykonalna.
mikrokontroler jest często uważany za produkt uboczny w rozwoju mikroprocesora. Proces wytwarzania i technika programowania, które są odpowiedzialne za rozwój mikroprocesorów, doprowadziły również do rozwoju mikrokontrolerów.
jeszcze dekadę temu mikrokontrolery są mniej popularne zarówno w społeczności technicznej, jak i w społeczeństwie, mimo że większość elektroniki użytkowej, takich jak telewizory, gry wideo, magnetowidy, telefony, windy itp. składa się z nich.
zanim przejdziemy do różnic między mikroprocesorem a mikrokontrolerem lub tabulacji mikrokontrolera a mikroprocesorem, zobaczmy krótkie wprowadzenie mikroprocesora i mikrokontrolera.
mikroprocesor
mikroprocesor, popularnie znany jako „Komputer na chipie” w swoich początkach, jest jednostką centralną ogólnego przeznaczenia (CPU) wykonaną na pojedynczym układzie scalonym (IC) i jest kompletnym komputerem cyfrowym (później mikrokontroler jest uważany za dokładniejszą formę kompletnego komputera). Jest to mały, ale bardzo potężny mózg elektroniczny, który działa z błyskawiczną prędkością i jest często używany do wykonywania instrukcji programu komputerowego w celu wykonywania operacji arytmetycznych i logicznych, przechowywania danych, sterowania systemem, operacji wejścia / wyjścia itp. zgodnie z instrukcją. Kluczowym terminem w definicji mikroprocesora jest „ogólnego przeznaczenia”.
oznacza to, że z pomocą mikroprocesora można zbudować prosty system lub dużą i złożoną maszynę wokół niego z kilkoma dodatkowymi komponentami zgodnie z aplikacją. Głównym zadaniem mikroprocesora jest przyjmowanie danych wejściowych z urządzeń wejściowych, a następnie przetwarzanie tych danych zgodnie z instrukcjami i dostarczanie wyniku tych instrukcji jako wyjścia przez urządzenia wyjściowe. Mikroprocesor jest przykładem sekwencyjnego urządzenia logicznego, ponieważ ma wewnętrzną pamięć i wykorzystuje ją do przechowywania instrukcji.
pierwszy komercyjny mikroprocesor został wydany przez Intela w listopadzie 1971 roku o nazwie 4004 (cztery tysiące cztery). Jest to 4-bitowy mikroprocesor.
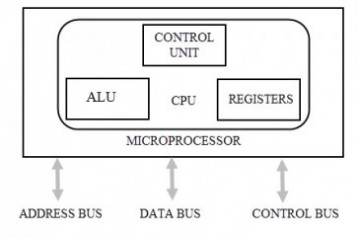
w mikroprocesorze jest pięć ważnych komponentów. Są to jednostki arytmetyczno-logiczne (ALU), Jednostka Sterująca, rejestry, Dekoder instrukcji i szyna danych, ale pierwsze trzy są uważane za istotne komponenty. SCHEMAT BLOKOWY mikroprocesora z tymi podstawowymi komponentami przedstawiono poniżej.
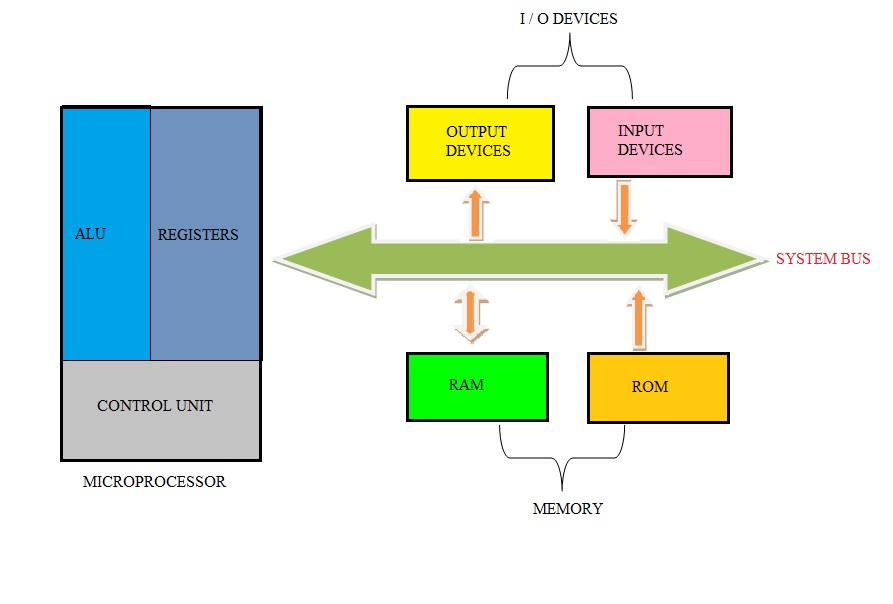
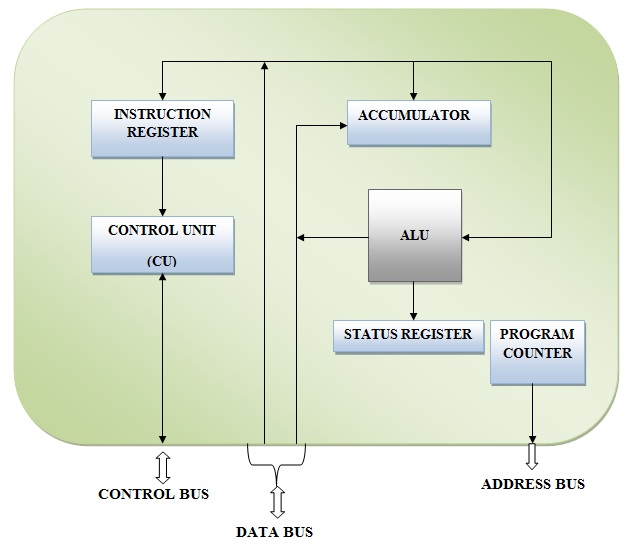
poniżej przedstawiono wewnętrzną strukturę mikroprocesora.
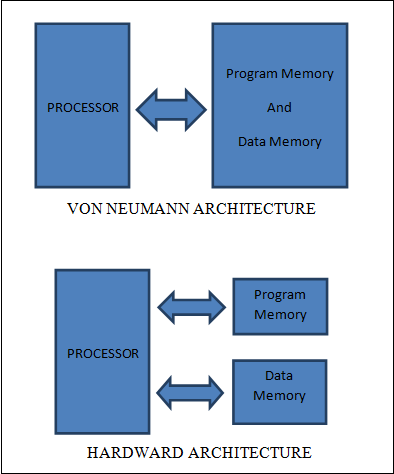
wcześniejsze mikroprocesory korzystały z architektury Von Neumanna, w której dane i instrukcje (programy) są przechowywane w tej samej pamięci. Mimo, że architektura ta jest prosta, istnieje wiele remisów. Jedną z głównych wad jest to, że instrukcje i dane nie mogą być dostępne w tym samym czasie, gdy dzielą jedną magistralę danych. To często pogarsza ogólną wydajność urządzenia. Później wprowadzono architekturę Harvardu, która wykorzystuje oddzielny program i pamięć danych z oddzielnymi magistralami, dzięki czemu zarówno dane, jak i instrukcje mogą być dostępne w tym samym czasie. Później opracowano zmodyfikowaną architekturę Harvarda, w której pamięć programu jest dostępna tak, jakby była pamięcią danych.
istnieją trzy podstawowe cechy używane do rozróżniania mikroprocesorów. Są to instrukcje, przepustowość i prędkość zegara. Zestaw instrukcji jest związany z programowaniem mikroprocesora, który składa się głównie z instrukcji, które mikroprocesor może wykonać. Przepustowość wskazuje maksymalną liczbę bitów przetwarzanych w jednej instrukcji. Prędkość zegara daje nie. instrukcji, które procesor może wykonać na sekundę. Zwykle Prędkość zegara jest w MHz (Mega Hertz) lub GHz (Giga Hertz). Ogólnie charakterystyka przepustowości i prędkości zegara są rozpatrywane razem. Im wyższe wartości obu tych cech, tym mocniejszy jest procesor.
Instruction set lub instruction set architecture (Isa) również odgrywa ważną rolę w projektowaniu i funkcjonowaniu procesora. Mikroprocesory są klasyfikowane jako CISC (Complex Instruction Set Computer) lub RISC (Reduced Instruction Set Computer).
Architektura CISC składa się z pełnego zestawu instrukcji, które są złożone, większe, mają większą moc obliczeniową i tak dalej. Pojedyncza Instrukcja CISC może być używana do wykonywania kilku operacji niskiego poziomu, operacji wieloetapowych i wielu trybów adresowania. Czas wykonania tych instrukcji jest długi. Przykładem architektury CISC jest Intel X86.
Architektura RISC została opracowana przez uświadomienie sobie, że zamiast używać pełnego zestawu instrukcji, wystarczą tylko często używane instrukcje. W tej architekturze instrukcje są małe i wysoce zoptymalizowane. Procesory RISC są stosowane tam, gdzie czas wykonania instrukcji powinien być krótszy, a koszt opracowania mniejszy. Urządzenia ARM są oparte na architekturze ARM, która jest podzbiorem RISC.
mikrokontroler
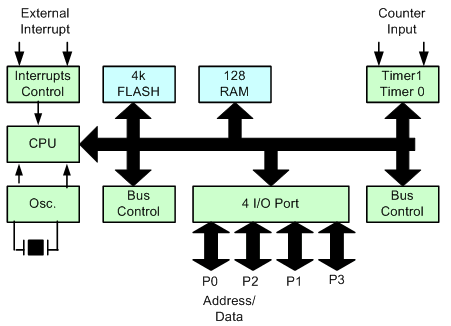
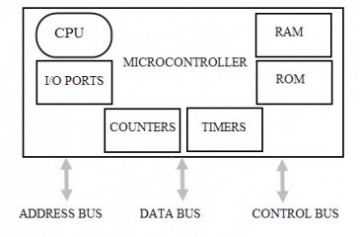
głównym powodem rozwoju mikrokontrolera jest przezwyciężenie jedynej wady mikroprocesora. Mimo że mikroprocesory są potężnymi urządzeniami, wymagają zewnętrznych układów, takich jak RAM, ROM, porty wejścia / wyjścia i inne komponenty, aby zaprojektować kompletny system roboczy. Utrudniało to ekonomicznie opracowanie skomputeryzowanych urządzeń konsumenckich na dużą skalę, ponieważ koszt systemu jest bardzo wysoki. Mikrokontrolery są urządzeniami, które faktycznie pasują do profilu „komputer na chipie”, ponieważ składa się z głównej jednostki przetwarzającej lub procesora wraz z innymi komponentami, które są niezbędne do uczynienia go kompletnym komputerem. Komponenty, które są obecne w typowym układzie scalonym mikrokontrolera, to procesor, pamięć, porty wejścia / wyjścia i timery. Pierwszy mikrokontroler został opracowany w 1971 roku przez Texas Instruments i nosi nazwę TMS 1000. Został udostępniony do użytku komercyjnego w 1974 roku. SCHEMAT BLOKOWY mikrokontrolera przedstawiono poniżej.
mikrokontrolery są zasadniczo używane w systemach wbudowanych. Skomputeryzowane lub cyfrowe sterowanie urządzeniami jest możliwe dzięki rozwojowi mikrokontrolerów. Proces rozwoju mikrokontrolera jest podobny do mikroprocesora.
mikrokontrolery można klasyfikować na podstawie szerokości magistrali, struktury pamięci i zestawu instrukcji. Szerokość szyny wskazuje rozmiar szyny danych. Mikrokontrolery mogą być klasyfikowane jako 8-bitowe, 16 – bitowe lub 32 – bitowe w zależności od szerokości magistrali. Wyższe szerokości magistrali często przekładają się na lepszą wydajność. Mikrokontrolery można podzielić na dwa typy w oparciu o ich struktury pamięci: Pamięć wbudowana i pamięć zewnętrzna. W przypadku mikrokontrolerów z wbudowaną pamięcią wymagane dane i pamięć programu są wbudowane w układ scalony. Natomiast mikrokontrolery pamięci zewnętrznej nie mają wbudowanej pamięci programowej i wymagają do tego zewnętrznego układu scalonego. Obecnie wszystkie mikrokontrolery są mikrokontrolerami z wbudowaną pamięcią. Klasyfikacja oparta na zestawie instrukcji jest podobna do klasyfikacji mikroprocesora. Mogą to być CISC lub RISC. Większość mikrokontrolerów stosuje architekturę CISC z ponad 80 instrukcjami. Mikrokontrolery można również podzielić ze względu na ich architekturę komputerową na von Neumanna i Harvarda.
poniższa tabela przedstawia niektóre różnice między mikroprocesorami a mikrokontrolerami.
 |
 |
| mikroprocesor asymiluje funkcję jednostki centralnej (CPU) na pojedynczy układ scalony (IC). | mikrokontroler można uznać za mały komputer, który ma procesor i kilka innych komponentów w celu uczynienia go komputerem. |
| mikroprocesory są wykorzystywane głównie w projektowaniu systemów ogólnego przeznaczenia od małych do dużych i złożonych systemów, takich jak super Komputery. | mikrokontrolery są stosowane w urządzeniach sterowanych automatycznie. |
| mikroprocesory są podstawowymi elementami komputerów osobistych. | mikrokontrolery są powszechnie stosowane w systemach wbudowanych |
| wydajność obliczeniowa mikroprocesora jest bardzo wysoka. Stąd może wykonywać złożone zadania. | mniejsza pojemność obliczeniowa w porównaniu z mikroprocesorami. Zwykle używane do prostszych zadań. |
| system oparty na mikroprocesorze może wykonywać wiele zadań. | system oparty na mikrokontrolerze może wykonywać pojedyncze lub bardzo niewiele zadań. |
| mikroprocesory posiadają zintegrowany koprocesor matematyczny. Skomplikowane obliczenia matematyczne, które obejmują zmiennoprzecinkowe mogą być wykonywane z dużą łatwością. | mikrokontrolery nie posiadają koprocesorów matematycznych. Używają oprogramowania do wykonywania obliczeń zmiennoprzecinkowych, co spowalnia urządzenie. |
| głównym zadaniem mikroprocesora jest wielokrotne wykonywanie cyklu instrukcji. Obejmuje to pobieranie, dekodowanie i wykonywanie. | oprócz wykonywania zadań pobierania, dekodowania i wykonywania, mikrokontroler kontroluje również swoje środowisko w oparciu o wynik cyklu instrukcji. |
| aby zbudować lub zaprojektować system (komputer), mikroprocesor musi być podłączony zewnętrznie do niektórych innych komponentów, takich jak pamięć (RAM i ROM) oraz porty wejścia / Wyjścia. | układ scalony mikrokontrolera ma zintegrowaną pamięć (zarówno RAM, jak i ROM) wraz z innymi komponentami, takimi jak urządzenia I / O i timery. |
| całkowity koszt systemu zbudowanego przy użyciu mikroprocesora jest wysoki. Wynika to z wymagań komponentów zewnętrznych. | koszt systemu zbudowanego przy użyciu mikrokontrolera jest mniejszy, ponieważ wszystkie komponenty są łatwo dostępne. |
| ogólnie zużycie energii i rozpraszanie jest wysokie ze względu na urządzenia zewnętrzne. Dlatego wymaga zewnętrznego układu chłodzenia. | zużycie energii jest mniejsze. |
| częstotliwość zegara jest bardzo wysoka, zwykle w kolejności Giga herców. | częstotliwość zegara jest mniej zwykle w kolejności Mega herców. |
| przepustowość instrukcji ma wyższy priorytet niż opóźnienie przerwania. | natomiast mikrokontrolery są zaprojektowane do optymalizacji opóźnienia przerwań. |
| mają kilka instrukcji manipulacji bitami | manipulacja bitami jest potężną i szeroko stosowaną funkcją w mikrokontrolerach. Mają liczne instrukcje manipulacji bitem. |
| zasadniczo mikroprocesory nie są używane w systemach czasu rzeczywistego, ponieważ są poważnie zależne od kilku innych komponentów. | mikrokontrolery są używane do obsługi zadań w czasie rzeczywistym, ponieważ są pojedynczymi zaprogramowanymi, samowystarczalnymi i zorientowanymi na zadania urządzeniami. |
pomijając różnice między mikroprocesorem a mikrokontrolerem, oczywiste jest, że mikroprocesor nie może zastąpić mikrokontrolera i odwrotnie. Obie technologie mają swój unikalny sposób wykorzystania w aplikacjach.