introduktionen av en teknik som kallas ”mikroprocessor” har förändrat hur vi ser, analyserar och kontrollerar världen som omger oss under de senaste två decennierna. Den första kommersiella mikroprocessorn är 4-bitars 4004 utvecklad av Intel och gjordes tillgänglig 1971.
sedan dess tog det en fenomenal framgång i sin utveckling och användning. Mikroprocessor anses vara en produkt av kombinerad utveckling inom datorarkitektur och integrerad krets (IC) tillverkning. Det har gjort begreppet persondatorer mycket genomförbart.
mikrokontroller anses ofta som en biprodukt i utvecklingen av mikroprocessorn. Tillverkningsprocessen och programmeringstekniken som är ansvariga för utvecklingen av mikroprocessorer har också lett till utvecklingen av mikrokontroller.
fram till för ett decennium sedan är mikrokontrollerna mindre populära i både det tekniska samhället och allmänheten även om de flesta konsumentelektronik som tv-apparater, videospel, videokassettinspelare, telefoner, hissar etc. består av dem.
innan vi går till skillnaderna mellan mikroprocessor och mikrokontroller eller tabulerande mikrokontroller vs mikroprocessor, låt oss se den korta introduktionen av mikroprocessor och mikrokontroller.
mikroprocessor
en mikroprocessor, populärt känd som ”dator på ett chip” i sina tidiga dagar, är en central processorenhet för allmänt ändamål (CPU) tillverkad på en enda integrerad krets (IC) och är en komplett digital dator (senare mikrokontroller anses vara mer exakt form av komplett dator). Det är en liten men mycket kraftfull elektronisk hjärna som arbetar med en blåsningshastighet och används ofta för att utföra instruktioner från ett datorprogram för att utföra aritmetiska och logiska operationer, lagra data, systemkontroll, input / output-operationer etc. enligt instruktionerna. Nyckelbegreppet i definitionen av en mikroprocessor är ”allmänt syfte”.
det betyder att man med hjälp av en mikroprocessor kan bygga ett enkelt system eller en stor och komplex maskin runt den med några extra komponenter enligt applikationen. En mikroprocessors huvuduppgift är att acceptera data som inmatning från inmatningsenheter och sedan bearbeta dessa data enligt instruktionerna och ge resultatet av dessa instruktioner som utmatning via utmatningsenheter. Mikroprocessor är ett exempel på sekventiell logisk enhet eftersom den har minne Internt och använder den för att lagra instruktioner.
den första kommersiella mikroprocessorn släpptes av Intel år 1971 November som heter 4004 (fyra tusen fyra). Det är 4-bitars mikroprocessor.
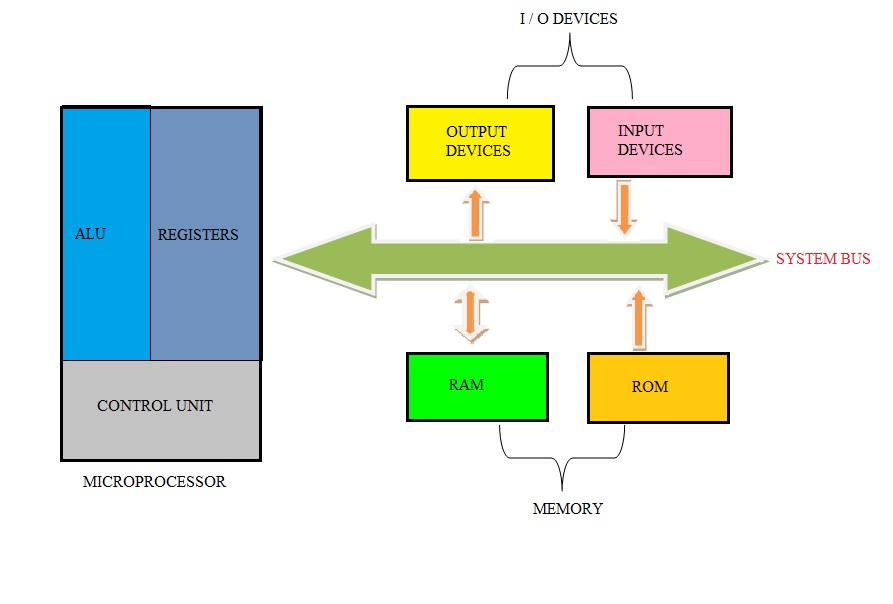
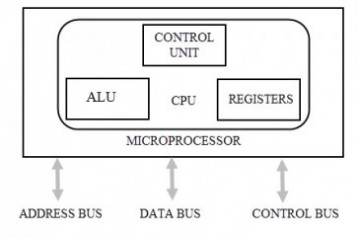
det finns fem viktiga komponenter i en mikroprocessor. De är aritmetisk och logisk enhet (ALU), styrenhet, register, Instruktionsavkodare och databuss men de tre första anses vara betydande komponenter. Blockschemat för en mikroprocessor med dessa grundläggande komponenter visas nedan.
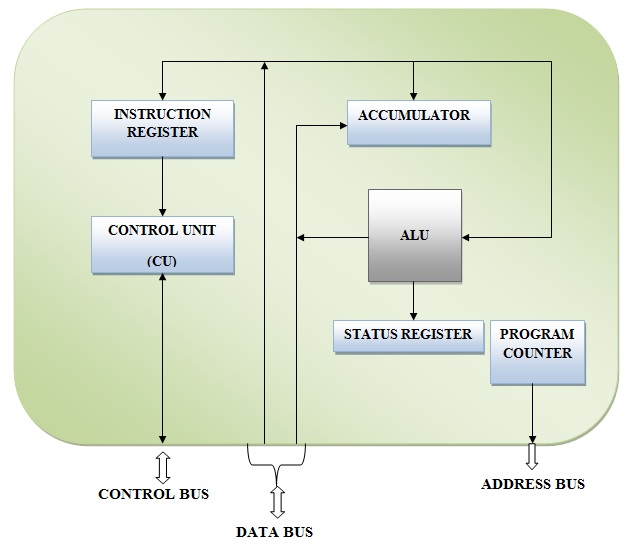
den inre strukturen hos en mikroprocessor visas nedan.
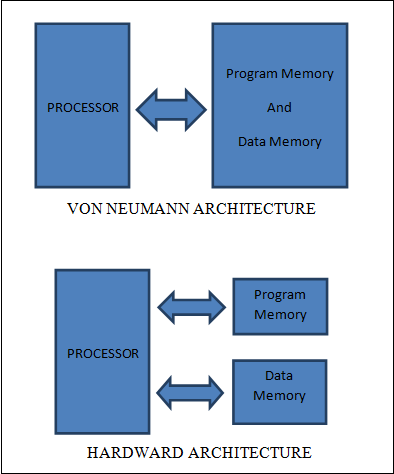
tidigare mikroprocessorer använde Von Neumann-arkitektur där data och instruktioner (program) lagras i samma minne. Även om denna arkitektur är enkel, det finns många drag ryggar. En av de största nackdelarna är att instruktioner och data inte kan nås samtidigt som de delar en enda databuss. Detta försämrar ofta enhetens övergripande prestanda. Senare introduceras Harvard architecture som använder separata program-och dataminnen med separata bussar så att både data och instruktioner kan nås samtidigt. Senare modifierad Harvard-arkitektur utvecklas där programminnet nås som om det var dataminne.
det finns tre grundläggande egenskaper som används för att differentiera mikroprocessorer. De är instruktionsuppsättning, bandbredd och klockhastighet. Instruktionsuppsättning är relaterad till programmering av mikroprocessorn som huvudsakligen består av instruktioner som en mikroprocessor kan utföra. Bandbredd anger maximalt antal bitar som bearbetas i en enda instruktion. Klockhastighet ger ingen. instruktioner en processor kan utföra per sekund. Vanligtvis är klockhastigheten i MHz (Mega Hertz) eller GHz (Giga Hertz). Generellt egenskaper bandbredd och klockhastighet ses tillsammans. Ju högre värdena för båda dessa egenskaper desto kraftfullare är processorn.
instruktionsuppsättning eller instruktionsuppsättningsarkitektur (Isa) spelar också en viktig roll i en processors design och funktion. Mikroprocessorer klassificeras som antingen CISC (Complex Instruction Set Computer) eller RISC (Reduced Instruction Set Computer).
CISC arkitektur består av full uppsättning instruktioner som är komplexa, större, har mer beräkningskraft och så vidare. En enda CISC-instruktion kan användas för att utföra flera lågnivåoperationer, flerstegsoperationer och flera adresseringslägen. Exekveringstiden för dessa instruktioner är lång. Intels X86 är ett exempel på CISC-arkitektur.
RISC architecture utvecklades genom att inse att istället för att använda full uppsättning instruktioner är bara de ofta använda instruktionerna tillräckliga. I denna arkitektur är instruktionerna små och mycket optimerade. RISC-processorer används där exekveringstiden för instruktionen ska vara mindre och kostnaden för utveckling är mindre. ARM-enheterna är baserade på ARM-arkitektur som är en delmängd av RISC.
mikrokontroller
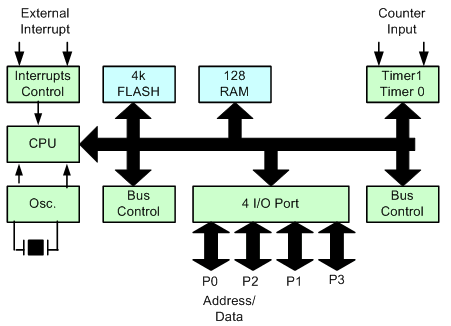
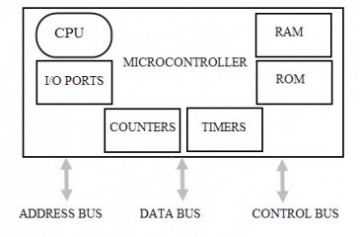
den främsta orsaken till utvecklingen av mikrokontroller är att övervinna den enda nackdelen med mikroprocessorn. Även om mikroprocessorer är kraftfulla enheter kräver de externa chips som RAM, ROM, Input / Output-portar och andra komponenter för att utforma ett komplett arbetssystem. Detta gjorde det ekonomiskt svårt att utveckla datoriserade konsumentapparater i stor skala eftersom systemkostnaden är mycket hög. Mikrokontroller är de enheter som faktiskt passar profilen ”dator – på – ett chip” eftersom den består av en huvudbehandlingsenhet eller processor tillsammans med några andra komponenter som är nödvändiga för att göra den till en komplett dator. Komponenterna som finns på en typisk mikrokontroller IC är CPU, minne, input / output portar och timers. Den första mikrokontroller utvecklades 1971 av Texas Instruments och kallas TMS 1000. Den gjordes tillgänglig för kommersiellt bruk 1974. Blockschemat för en mikrokontroller visas nedan.
mikrokontroller används i grunden i inbyggda system. Datoriserad eller digital styrning av enheter görs trovärdig med utvecklingen av mikrokontroller. Utvecklingsprocessen för mikrokontroller liknar den hos en mikroprocessor.
mikrokontroller kan klassificeras baserat på bussbredd, minnesstruktur och instruktionsuppsättning. Bussbredd anger storleken på databussen. Mikrokontroller kan klassificeras som 8-bitars, 16 – bitars eller 32-bitars baserat på bussbredden. Högre bussbredder resulterar ofta i bättre prestanda. Mikrokontroller kan delas in i två typer baserat på deras minnesstrukturer: inbäddat minne och externt minne. Vid inbäddade minnesmikrokontroller är det nödvändiga data-och programminnet inbäddat i IC. Medan externa minnesmikrokontroller inte har programminne inbäddat på dem och kräver ett externt chip för detsamma. Nu en dag är alla mikrokontroller inbäddade minnesmikrokontroller. Klassificeringen baserad på instruktionsuppsättning liknar den för en mikroprocessor. De kan vara antingen CISC eller RISC. Majoriteten av mikrokontroller följer CISC-arkitektur med över 80 instruktioner. Mikrokontroller kan också delas upp baserat på deras datorarkitektur i von Neumann och Harvard.
följande tabell visar några av skillnaderna mellan mikroprocessorer och mikrokontroller.
 |
 |
| mikroprocessor assimilerar funktionen hos en central processorenhet (CPU) till en enda integrerad krets (IC). | mikrokontroller kan betraktas som en liten dator som har en processor och några andra komponenter för att göra den till en dator. |
| mikroprocessorer används främst vid utformning av allmänna system från små till stora och komplexa system som superdatorer. | mikrokontroller används i automatiskt styrda enheter. |
| mikroprocessorer är grundläggande komponenter i persondatorer. | mikrokontroller används vanligtvis i inbyggda system |
| beräkningskapaciteten hos mikroprocessorn är mycket hög. Därför kan utföra komplexa uppgifter. | mindre beräkningskapacitet jämfört med mikroprocessorer. Vanligtvis används för enklare uppgifter. |
| ett mikroprocessorbaserat system kan utföra många uppgifter. | ett mikrokontroller baserat system kan utföra enstaka eller mycket få uppgifter. |
| mikroprocessorer har integrerad Math Coprocessor. Komplexa matematiska beräkningar som involverar flyttal kan utföras med stor lätthet. | mikrokontroller har inte matematiska coprocessorer. De använder programvara för att utföra flytpunktsberäkningar som saktar ner enheten. |
| mikroprocessorns huvuduppgift är att utföra instruktionscykeln upprepade gånger. Detta inkluderar hämta, avkoda och exekvera. | förutom att utföra uppgifterna för hämta, avkoda och exekvera, kontrollerar en mikrokontroller också sin miljö baserat på utgången från instruktionscykeln. |
| för att bygga eller designa ett system (dator) måste en mikroprocessor anslutas externt till vissa andra komponenter som minne (RAM och ROM) och Input / Output-portar. | IC för en mikrokontroller har minne (både RAM och ROM) integrerat på det tillsammans med några andra komponenter som I / O-enheter och timers. |
| den totala kostnaden för ett system byggt med en mikroprocessor är hög. Detta beror på kravet på externa komponenter. | kostnaden för ett system byggt med en mikrokontroller är mindre eftersom alla komponenter är lättillgängliga. |
| generellt är strömförbrukningen och spridningen hög på grund av de externa enheterna. Därför krävs det externt kylsystem. | strömförbrukningen är mindre. |
| klockfrekvensen är mycket hög vanligtvis i storleksordningen Giga Hertz. | klockfrekvensen är vanligtvis mindre i storleksordningen Mega Hertz. |
| instruktion genomströmning ges högre prioritet än avbryta latens. | däremot är mikrokontroller utformade för att optimera avbrottsfördröjningen. |
| har några bit manipulation instruktioner | Bit manipulation är kraftfull och allmänt använd funktion i mikrokontroller. De har många Bit manipulation instruktioner. |
| i allmänhet används inte mikroprocessorer i realtidssystem eftersom de är allvarligt beroende av flera andra komponenter. | mikrokontroller används för att hantera realtidsuppgifter eftersom de är enskilda programmerade, självförsörjande och uppgiftsorienterade enheter. |
bortsett från skillnaderna mellan mikroprocessorn och mikrokontroller är det uppenbart att en mikroprocessor inte kan ersätta en mikrokontroller och vice versa. Båda delarna av tekniken har sitt unika sätt att använda i applikationer.