podobně jako eliptická dráha může být hyperbolická trajektorie pro daný systém definována (ignorující orientaci) její poloosou a excentricitou. S hyperbolickou oběžnou dráhou však mohou být další parametry užitečnější při porozumění pohybu těla. V následující tabulce jsou uvedeny hlavní parametry popisující cestu těla po hyperbolické dráze kolem jiného na základě standardních předpokladů a vzorce, které je spojují.
tyto rovnice mohou být nepřesné. Jsou zapotřebí další odkazy.
| Prvek | Symbol | Vzorec | použití v ∞ {\displaystyle v_{\infty }}
 (nebo {\displaystyle a}  ), a b {\displaystyle b}  |
|---|---|---|---|
| Standardní gravitační parametr | μ {\displaystyle \mu \,}
 |
v 2 ( v 2 / r − 1 / a ) {\displaystyle {\frac {v^{2}}{(2/r-1/a)}}}
 |
b v ∞ 2 dětská postýlka θ ∞ {\displaystyle bv_{\infty }^{2}\cot \theta _{\infty }}
 |
| Výstřednost (>1) | e {\displaystyle e}
 |
ℓ r p − 1 {\displaystyle {\frac {\ell }{r_{p}}}-1}
 |
1 + b 2 / 2 {\displaystyle {\sqrt {1+b^{2}/a^{2}}}}
 |
| poloosa (<0) | a {\displaystyle A\,\!}
 |
1 / ( 2 / r − v 2 / μ ) {\displaystyle 1/(2/r-v^{2}/\mu )}
 |
− μ / v ∞ 2 {\displaystyle -\mu /v_{\infty }^{2}}
 |
| Hyperbolické nadměrné rychlosti | v ∞ {\displaystyle v_{\infty }}
|
− μ / a {\displaystyle {\sqrt {-\mu /a}}}
 |
|
| (Vnější) Úhel mezi asymptoty | 2 θ ∞ {\displaystyle 2\theta _{\infty }}
 |
2 protože − 1 ( − 1 / e ) {\displaystyle 2\cos ^{-1}(-1/e)}
 |
π + 2 tan − 1 ( b / a ) {\displaystyle \pi +2\tan ^{-1}(b/a)}
 |
| Úhel mezi asymptoty a konjugát osy z hyperbolické dráhy přístup |
2 ν {\displaystyle 2\nu }
 |
2 θ ∞ − π {\displaystyle 2\theta _{\infty }-\pi }
 |
2 sin − 1 ( 1 ( 1 + r p ∗ v ∞ 2 / μ ) ) {\displaystyle 2\sin ^{-1}{\bigg (}{\frac {1}{(1+r_{p}*v_{\infty }^{2}/\mu )}}{\bigg )}}
 |
| Vliv parametru (semi-vedlejší osa) | b {\displaystyle b}
|
− e 2 − 1 {\displaystyle – {\sqrt {e^{2}-1}}}
 |
|
| Semi-latus rectum | ℓ {\displaystyle \ell }
 |
a ( e 2 − 1 ) {\displaystyle(e^{2}-1)}
 |
− b 2 / a = h 2 / μ {\displaystyle -b^{2}/=h^{2}/\mu }
 |
| Přistávání vzdálenost | r p {\displaystyle r_{p}}
 |
a ( 1 − e ) {\displaystyle a(1-e)}
 |
2 + b 2 + a {\displaystyle {\sqrt {a^{2}+b^{2}}}+}
 |
| Konkrétní orbitální energie | ε {\displaystyle \varepsilon }
 |
− μ / 2 {\displaystyle -\mu /2a}
 |
v ∞ 2 / 2 {\displaystyle v_{\infty }^{2}/2}
 |
| Specifický moment hybnosti | h {\displaystyle h}
 |
μ ℓ {\displaystyle {\sqrt {\mu \ell }}}
 |
b v ∞ {\displaystyle bv_{\infty }}
 |
Poloosa, energie a hyperbolické přebytek velocityEdit
Viz také: Charakteristické energie
semi hlavní osy ({\displaystyle\,\!}
) není okamžitě viditelný s hyperbolické trajektorie, ale může být konstruován jako je vzdálenost od přistávání na bod, kde se dvě asymptoty kříž. Obvykle je konvencí záporné udržovat různé rovnice v souladu s eliptickými oběžnými dráhami.
semi hlavní osy je přímo spojena s konkrétní orbitální energie ( ϵ {\displaystyle \epsilon \,}

) nebo charakteristické energie C 3 {\displaystyle C_{3}}

oběžné dráhy a rychlosti těla dosáhne na jako vzdálenost má tendenci k nekonečnu, hyperbolické nadměrné rychlosti ( v ∞ {\displaystyle v_{\infty }\,\!}

). v ∞ 2 = 2 ϵ = C 3 = − μ / a {\displaystyle v_{\infty }^{2}=2\epsilon =C_{3}=-\mu /}

nebo = − μ / v ∞ 2 {\displaystyle a=-{\mu /{v_{\infty }^{2}}}}

kde: μ = G m {\displaystyle \mu =Gm\,\!}

je standardní gravitační parametr a C 3 {\displaystyle C_{3}}
je charakteristická energie, běžně používané při plánování meziplanetárních misí
Všimněte si, že celková energie je pozitivní v případě hyperbolické trajektorii (vzhledem k tomu, že je negativní na eliptické oběžné dráze).
Excentricita a úhel mezi přístupem a departureEdit
S hyperbolické dráze orbitální excentricita ( e {\displaystyle e\,}

) je větší než 1. Excentricita přímo souvisí s úhlem mezi asymptoty. S excentricitou těsně nad 1 je hyperbola ostrým tvarem „v“. At e = 2 {\displaystyle e={\sqrt {2}}}

asymptoty jsou v pravém úhlu. S e > 2 {\displaystyle e>2}

asymptoty jsou více než 120° od sebe, a při přistávání vzdálenost je větší než semi hlavní osy. Jak se excentricita dále zvyšuje, pohyb se blíží přímce.
úhel mezi směrem přistávání a asymptota z centrálního tělo je pravá anomálie, jako je vzdálenost má tendenci k nekonečnu ( θ ∞ {\displaystyle \theta _{\infty }\,}

), takže 2 θ ∞ {\displaystyle 2\theta _{\infty }\,}

je vnější úhel mezi směry přiblížení a odletu, (mezi asymptoty). Pak θ ∞ = cos − 1 ( − 1 / e ) {\displaystyle \theta {_{\infty }}=\cos ^{-1}(-1/e)\,}

nebo e = − 1 / cos θ ∞ {\displaystyle e=-1/\cos \theta {_{\infty }}\,}

Vliv parametru a vzdálenost nejbližší přístup Upravit
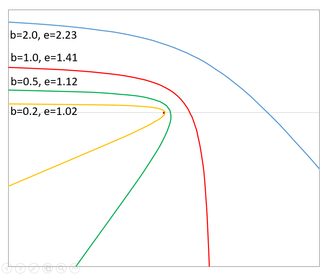
Hyperbolické trajektorie následuje objekty blížící centrální objekt (malá tečka), s stejné hyperbolické nadměrné rychlosti (a semi-hlavní osa (=1)) a od stejného směr, ale s různými parametry nárazu a excentricitami. Žlutá čára skutečně prochází kolem centrální tečky a blíží se k ní těsně.
dopad parametrem je vzdálenost, o kterou tělo, pokud to pokračoval nevzrušeně cestu, by si ujít ústřední orgán při nejbližším přiblížení. S orgány zažívá gravitační síly a po hyperbolické trajektorie je rovna semi-vedlejší osu hyperboly.
v situaci, kdy se kosmická loď nebo kometa blíží k planetě, bude parametr nárazu a nadměrná rychlost přesně známa. Pokud je centrální tělo známo, trajektorie může být nyní nalezena, včetně toho, jak blízko bude blížící se tělo v periapsi. Pokud je to menší než poloměr planety, měl by se očekávat dopad. Vzdálenost nejbližšího přiblížení nebo periapsis vzdálenost je dána:
r p = − a ( e − 1 ) = μ / v ∞ 2 ( 1 + ( b v ∞ 2 / μ ) 2 − 1 ) {\displaystyle r_{p}=-a(e-1)=\mu /v{_{\infty }}^{2}({\sqrt {1+(bv{_{\infty }}^{2}/\mu )^{2}}}-1)}

Takže pokud se kometa blíží k Zemi (efektivní poloměr ~6400 km) s rychlostí 12.5 km/s (přibližné minimální rychlost tělesa přicházející z vnější Sluneční Soustavy) je, aby se zabránilo kolizi se zemí, dopad parametr bude muset být alespoň 8600 km, nebo 34% větší než poloměr Země. Tělo se blíží Jupiter (poloměr 70000 km) z vnější Sluneční Soustavy s rychlostí 5,5 km/h, bude třeba vliv parametru být alespoň 770,000 km nebo 11 krát poloměr Jupitera, aby se zabránilo kolizi.
Pokud hmotnost ústřední orgán není známo, jeho standardní gravitační parametr, a proto jeho hmotnost, může být určena odchylka menší tělo spolu s dopadem parametr a přístup, rychlost. Protože obvykle lze všechny tyto proměnné přesně určit, průlet kosmické lodi poskytne dobrý odhad tělesné hmotnosti.
μ = b v ∞ 2 tan δ / 2 {\displaystyle \mu =bv_{\infty }^{2}\tan \delta /2}

, kde δ = 2 θ ∞ − π {\displaystyle \delta =2\theta _{\infty }-\pi }

je úhel menší tělo vychýlí z přímého směru v jeho průběhu.