elliptisen radan tavoin hyperbolinen liikerata tietylle systeemille voidaan määritellä (orientaation huomiotta jättäminen) sen semi-duuriakselin ja eksentrisyyden perusteella. Hyperbolisella kiertoradalla muut parametrit voivat kuitenkin olla hyödyllisempiä kappaleen liikkeen ymmärtämisessä. Seuraavassa taulukossa on lueteltu tärkeimmät parametrit, jotka kuvaavat hyperbolista liikerataa seuraavan kappaleen kulkua toisen ympäri standardioletusten mukaisesti ja niitä yhdistävää kaavaa.
nämä yhtälöt voivat olla epätarkkoja. Lisäohjeita tarvitaan.
| alkuaine | symboli | Formula_4892> | käyttäen v ∞ {\displaystyle v_{\infty }}
 (tai A {\displaystyle a}  ), ja b {\displaystyle b}  |
|---|---|---|---|
| Standard gravitaatioparametri | μ {\displaystyle \mu \,}
 |
v 2 (2 / r − 1 / A ) {\displaystyle {\frac {v^{2}} {(2 / r-1 / a)}}}
 |
b v ∞ 2 cot θ ∞ {\displaystyle bv_ {\infty }^{2}\cot \theta _{\infty }}
 |
| eksentrisyys (>1) | e {\displaystyle e}
 |
ℓ r p − 1 {\displaystyle {\frac {\ell }{r_{p}}}-1}
 |
1 + b 2 / a 2 {\displaystyle {\sqrt {1+b^{2} / a^{2}}}}
 |
| Semiduuriakseli (<0) | a – mitä?}
 |
1 / ( 2 / r-v 2 / μ) {\displaystyle 1/(2/r-v^{2} / \mu )}
 |
− μ / v ∞ 2 {\displaystyle – \mu / v_{\infty }^{2}}
 |
| hyperbolinen liikanopeus | V ∞ {\displaystyle v_{\infty }}
|
− μ / A {\displaystyle {\sqrt {- \mu / a}}}
 |
|
| (ulkoinen) välinen kulma asymptootit | 2 θ ∞ {\displaystyle 2\theta _{\infty }}
 |
2 cos − 1 (- 1 / e) {\displaystyle 2\cos ^{-1}(-1 / e)}
 |
π + 2 tan-1 (B / A) {\displaystyle \pi + 2\tan ^{-1}(b/a)}
 |
| hyperbolisen lähestymisreitin asymptoottien ja konjugaattiakselin välinen kulma | 2 ν {\displaystyle 2\nu }
 |
2 θ ∞ – π {\displaystyle 2\theta _{\infty } – \pi }

|
2 sin-1 (1 (1 + r p ∗ v ∞ 2 / μ)) {\displaystyle 2\sin ^{-1} {\bigg (} {\frac {1} {(1+r_ {p}*v_ {\infty} ^{2}/\mu)}} {\bigg )}}
 |
| Impact parameter (semi-minor axis) | b {\displaystyle b}
|
− a 2-1{\displaystyle-a {\sqrt {e^{2}-1}}}
 |
|
| Puolilatauksen peräsuoli | ℓ {\displaystyle \ell }

|
ja (e 2 – 1)^{2}-1)}
 |
− b 2 / A = H 2/μ {\displaystyle-B^{2}/A=H^{2}/\mu }
 |
| Periapsiksen etäisyys | r p {\displaystyle r_{p}}

|
ja(1-e ) {\displaystyle A (1-e)}
 |
a 2 + b 2 + A {\displaystyle {\sqrt {a^{2} + B^{2}}} + a}
 |
| Specific orbital energy | ε {\displaystyle \varepsilon }

|
− μ / 2 A {\displaystyle -\mu /2A}
 |
v ∞ 2 / 2 {\displaystyle v_{\infty }^{2}/2}
 |
| Ominaiskulmamomentti | h {\displaystyle h}
 |
μ ℓ {\displaystyle {\sqrt {\mu \ ell }}}
 |
B V ∞ {\displaystyle bv_{\infty }}
 |
Semiduuriakseli, Energia ja hyperbolinen ylivelkaantumisaste
Katso myös: Ominaisenergia
semiduuriakseli (A {\displaystyle A\,\!}
) ei ole välittömästi näkyvissä hyperbolisella liikeradalla, mutta se voidaan konstruoida, koska se on etäisyys periapsiksesta pisteeseen, jossa kaksi asymptoottia risteävät. Yleensä se on konventionaalisesti negatiivinen, jotta eri yhtälöt pysyisivät elliptisten ratojen kanssa yhdenmukaisina.
semi-duuri-akseli on suoraan yhteydessä ominaiseen orbitaalienergiaan (ϵ {\displaystyle \epsilon \,}

) tai ominaisenergia C 3 {\displaystyle C_{3}}

kiertoradalla, ja siihen nopeuteen, jonka kappale saavuttaa etäisyyden pyrkiessä äärettömyyteen, hyperbolinen ylinopeus ( V ∞ {\displaystyle v_{\infty}\,\!}

). v ∞ 2 = 2 ϵ = c 3 = − μ / A {\displaystyle v_{\infty }^{2}=2\epsilon =C_{3}=-\mu /a}

or a = − μ / v ∞ 2 {\displaystyle A=-{\mu /{V_{\infty }^{2}}}}

missä: μ = G m {\displaystyle \mu =Gm\,\!}

on standardi gravitaatioparametri ja C 3 {\displaystyle C_{3}}
on ominaisenergia, jota käytetään yleisesti planeettainvälisten lentojen suunnittelussa
huomaa, että kokonaisenergia on positiivinen hyperbolisella radalla (kun taas elliptisellä radalla se on negatiivinen).
eksentrisyys ja lähestymisen ja lähdön välinen kulma
hyperbolisella liikeradalla kiertoradan eksentrisyys ( e {\displaystyle e\,}

) on suurempi kuin 1. Eksentrisyys liittyy suoraan asymptoottien väliseen kulmaan. Eksentrisyyden ollessa hieman yli 1 Hyperbeli on terävä ” v ” – muoto. At e = 2 {\displaystyle e={\sqrt {2}}}

asymptootit ovat suorassa kulmassa. Jossa e > 2 {\displaystyle e>2}

asymptoottien etäisyys toisistaan on yli 120°, ja periapsiksen etäisyys on suurempi kuin semi-duuri-akselin. Eksentrisyyden kasvaessa edelleen liike lähestyy suoraa.
periapsiksen suunnan ja keskuskappaleen asymptootin välinen kulma on todellinen anomalia, sillä etäisyys pyrkii äärettömyyteen (θ ∞ {\displaystyle \theta _{\infty }\,}

), joten 2 θ ∞ {\displaystyle 2\theta _{\infty }\,}

on lähestymis-ja lähtösuuntien (asymptoottien) välinen ulkokulma. Silloin θ ∞ = Cos − 1 (- 1 / e) {\displaystyle \theta {_{\infty }} = \cos ^{-1} (-1 / e)\,}

tai E = – 1 / cos θ ∞ {\displaystyle e=-1 / \cos \theta {_{\infty }}\,}

Iskuparametri ja lähimmän lähestymisen etäisyys muokkaa
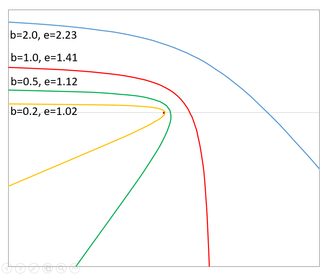
Hyperbolic trajectories seuraa esineitä lähestyy Keski objekti (pieni piste) samalla hyperbolic liikanopeus (ja semi-major axis (=1)) ja samasta suunta, mutta eri vaikutus parametrit ja eksentrisyys. Keltainen viiva todellakin kulkee keskuspisteen ympäri ja lähestyy sitä tarkasti.
törmäysparametri on etäisyys,jolla kappale, jos se jatkaisi kiertymätöntä rataa, ohittaisi keskuskappaleen lähimmillään. Kappaleilla, jotka kokevat gravitaatiovoimia ja seuraavat hyperbolisia liikeratoja, se on yhtä suuri kuin hyperbelin semi-molliakseli.
jos avaruusalus tai komeetta lähestyy planeettaa, törmäysparametri ja ylinopeus tunnetaan tarkasti. Jos keskuskappale tunnetaan, liikerata voidaan nyt löytää, mukaan lukien kuinka lähellä lähestyvä kappale on periapsiksessa. Jos tämä on pienempi kuin planeetan säde, on odotettavissa törmäys. Lähimmän lähestymisen etäisyys eli periapsiksen etäisyys saadaan:
R p = − A ( e − 1 ) = μ / v ∞ 2 ( 1 + ( b v ∞ 2 / μ ) 2-1 ) {\displaystyle r_{P}=-A(e-1)=\mu /v{_{\infty }}^{2}({\sqrt {1+(bv{_{\infty }}^{2} / \mu )^{2}}}-1)}

joten jos komeetta lähestyy Maata (tehollinen säde ~6400 km) nopeudella 12.5 km / s (ulommasta aurinkokunnasta tulevan kappaleen likimääräinen minimilähestymisnopeus) on välttää törmäys maahan, törmäysparametrin on oltava vähintään 8600 km eli 34% enemmän kuin Maan säde. Kappale lähestyy Jupiteria (säde 70000 km) aurinkokunnan uloimmasta osasta nopeudella 5,5 km/h, joten törmäysparametrin on oltava vähintään 770 000 km tai 11 kertaa Jupiterin säde välttääkseen törmäyksen.
jos keskuskappaleen massaa ei tunneta, sen vakio gravitaatioparametri ja siten sen massa voidaan määrittää pienemmän kappaleen taipuman sekä törmäysparametrin ja lähestymisnopeuden perusteella. Koska yleensä kaikki nämä muuttujat voidaan määrittää tarkasti, ohilento avaruusalus antaa hyvän arvion kehon massasta.
μ = b v ∞ 2 tan δ δ / 2 {\displaystyle \mu =bv_{\infty }^{2}\tan \delta /2}

missä δ = 2 θ ∞ − π {\displaystyle \Delta =2\theta _{\infty }-\pi }

on kulma, josta pienempi kappale poikkeaa suora viiva sen kurssissa.