“마이크로프로세서”라는 기술의 도입은 지난 20 년 동안 우리를 둘러싼 세계를 보고 분석하고 통제하는 방식을 변화시켰습니다. 최초의 상용 마이크로프로세서는 인텔이 개발한 4 비트 4004 로 1971 년에 출시되었다.
그 이후로 개발 및 사용에있어 놀라운 성공을 거두었습니다. 마이크로프로세서는 컴퓨터 아키텍처와 집적회로 제조 분야에서 복합적인 발전의 산물로 간주됩니다. 그것은 개인 컴퓨팅의 개념을 매우 실현 가능하게 만들었습니다.
마이크로 컨트롤러는 종종 마이크로 프로세서의 개발에 부산물로 간주됩니다. 마이크로 프로세서의 개발을 담당하는 제조 공정 및 프로그래밍 기술은 또한 마이크로 컨트롤러의 개발로 이어졌습니다.
10 년 전까지 만해도 마이크로 컨트롤러는 텔레비전,비디오 게임,비디오 카세트 레코더,전화기,엘리베이터 등과 같은 대부분의 가전 제품이 기술 커뮤니티와 일반 대중 모두에서 덜 인기가 있습니다. 그들의 구성.
마이크로프로세서와 마이크로컨트롤러의 차이점을 살펴보기 전에 마이크로프로세서와 마이크로컨트롤러의 간략한 소개를 살펴보자.
마이크로프로세서
마이크로프로세서,널리 알려진”칩에 컴퓨터”초기에,범용 중앙 처리 장치(중앙 처리 장치)단일 집적 회로(지능화)에 조작 하 고 완전 한 디지털 컴퓨터(나중에 마이크로 컨트롤러는 완전 한 컴퓨터의 더 정확한 형태로 간주 됩니다). 그것은 젖어 속도로 작동하고 종종 데이터,시스템 제어,입력/출력 작업 등을 저장,산술 및 논리 연산을 수행하기 위해 컴퓨터 프로그램의 명령을 수행하는 데 사용되는 작지만 매우 강력한 전자 두뇌입니다 지침에 따라. 마이크로프로세서의 정의에서 핵심 용어는”범용”입니다.
마이크로프로세서의 도움으로 응용 프로그램에 따라 몇 가지 추가 구성 요소를 사용하여 간단한 시스템이나 크고 복잡한 시스템을 구축 할 수 있음을 의미합니다. 마이크로 프로세서의 주요 작업은 입력 장치에서 입력으로 데이터를 받아 지침에 따라이 데이터를 처리하고 출력 장치를 통해 출력으로 이러한 지침의 결과를 제공하는 것입니다. 마이크로프로세서는 내부적으로 메모리가 있고 명령어를 저장하는 데 사용하기 때문에 순차 논리 장치의 예입니다.
최초의 상용 마이크로 프로세서는 4004(사천 사)로 명명 년 1971 년 11 월 인텔에 의해 발표되었다. 그것은 4 비트 마이크로 프로세서입니다.
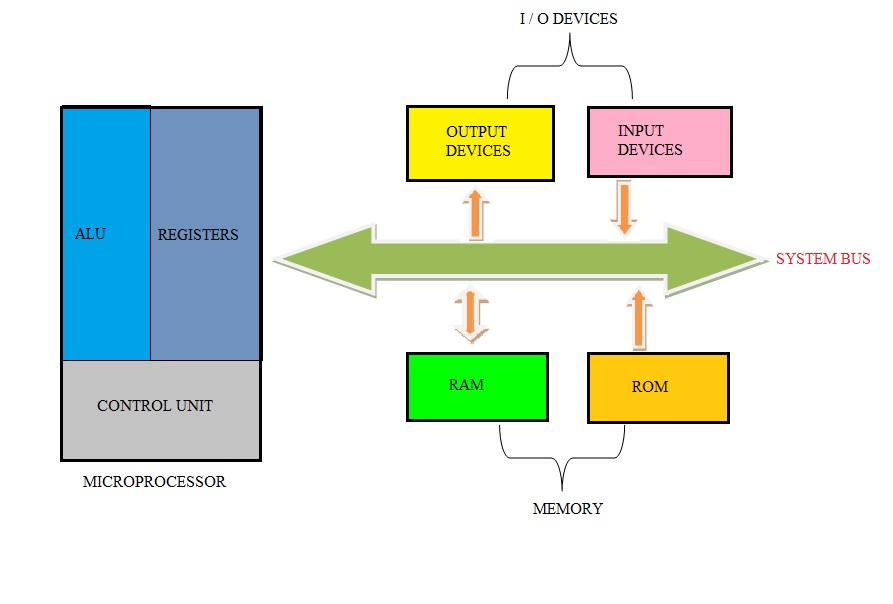
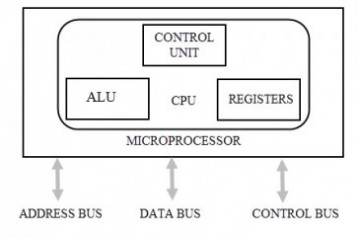
마이크로 프로세서에는 다섯 가지 중요한 구성 요소가 있습니다. 이들은 산술 및 논리 장치(알루),제어 장치,레지스터,명령 디코더 및 데이터 버스이지만 처음 세 개는 중요한 구성 요소로 간주됩니다. 이러한 기본 구성 요소가있는 마이크로 프로세서의 블록 다이어그램이 아래에 나와 있습니다.
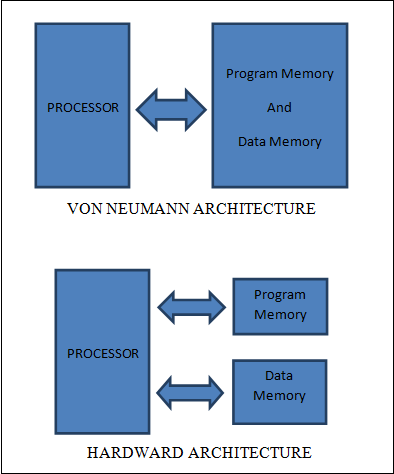
마이크로프로세서의 내부 구조는 아래와 같다.이전의 마이크로프로세서는 폰 노이만 아키텍처를 사용하여 데이터와 명령어(프로그램)가 동일한 메모리에 저장되었다. 이 아키텍처는 간단하더라도,많은 무승부 백업이 있습니다. 주요 단점 중 하나는 명령어와 데이터가 단일 데이터 버스를 공유하는 동시에 액세스 할 수 없다는 것입니다. 이것은 종종 장치의 전반적인 성능을 저하시킵니다. 이후,별도의 버스와 함께 별도의 프로그램 및 데이터 메모리를 사용하는 하버드 아키텍처가 도입되어 데이터와 명령어를 동시에 액세스 할 수 있습니다. 나중에 수정 된 하버드 아키텍처는 프로그램 메모리가 데이터 메모리 인 것처럼 액세스되는 개발된다.
마이크로 프로세서를 구별하는 데 사용되는 세 가지 기본 특성이 있습니다. 명령어 세트,대역폭 및 클럭 속도입니다. 명령어 집합은 주로 마이크로프로세서가 실행할 수 있는 명령어로 구성된 마이크로프로세서의 프로그래밍과 관련이 있습니다. 대역폭은 단일 명령어로 처리되는 최대 비트 수를 나타냅니다. 클럭 속도는 더 제공하지 않습니다. 명령의 프로세서는 초당 실행할 수 있습니다. 일반적으로 클럭 속도는 메가 헤르츠(메가 헤르츠)또는 기가 헤르츠(기가 헤르츠)입니다. 일반적으로 특성 대역폭 및 클럭 속도가 함께 보였다. 이 두 특성의 값이 높을수록 프로세서가 더 강력 해집니다.
명령어 세트 또는 명령어 세트 아키텍처는 또한 프로세서의 설계 및 기능에 중요한 역할을 한다. 마이크로 프로세서는 다음과 같이 분류됩니다.
복잡 한 명령어의 전체 집합 구성,더 큰,더 많은 연산 능력 등. 단일 명령어를 사용하여 여러 저수준 작업,다단계 작업 및 다중 주소 지정 모드를 실행할 수 있습니다. 이 지침의 실행 시간은 길다. 인텔의 86 은 시스크 아키텍처의 예입니다.
리스크 아키텍처는 전체 명령어 세트를 사용하는 대신 자주 사용하는 명령어만으로 충분하다는 것을 인식함으로써 개발되었다. 이 아키텍처에서 지침은 작고 고도로 최적화되어 있습니다. 명령어의 실행 시간이 단축되고 개발 비용이 절감되는 경우에 사용됩니다. 이것은 수학적으로 정확한 유형 계층구조인,강력한 타입을 정의합니다.
마이크로 컨트롤러
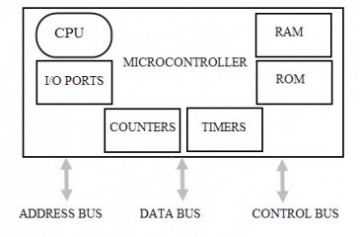
마이크로 컨트롤러 개발의 주된 이유는 마이크로 프로세서의 유일한 단점을 극복하는 것입니다. 마이크로 프로세서는 강력한 장치이지만,그들은 완전한 작업 시스템을 설계하기 위해 램,롬,입력/출력 포트 및 기타 구성 요소와 같은 외부 칩을 필요로한다. 이로 인해 시스템 비용이 매우 높기 때문에 컴퓨터 가전 제품을 대규모로 개발하는 것이 경제적으로 어려워졌습니다. 마이크로 제어기는 그것에게 완전한 컴퓨터를 만들기 위하여 필요한 다른 분대와 함께 주요 처리 장치 또는 가공업자로 이루어져 있기 때문에 실제로 단면도”컴퓨터에 칩”를 적합한 장치입니다. 일반적인 마이크로컨트롤러에 존재하는 구성 요소는 프로세서,메모리,입/출력 포트 및 타이머입니다. 첫 번째 마이크로 컨트롤러는 텍사스 인스트루먼트에 의해 1971 년에 개발되었으며,1000. 그것은 1974 년에 상업적인 사용을 위해 이용 가능 하 게 되었다. 마이크로 컨트롤러의 블록 다이어그램은 다음과 같습니다.
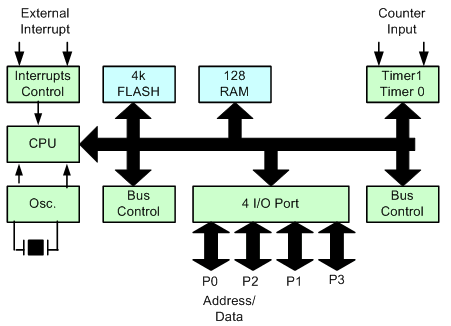
마이크로컨트롤러의 블록 직경은 기본적으로 임베디드 시스템에 사용됩니다. 장치의 전산화 또는 디지털 제어는 마이크로 컨트롤러의 개발과 함께 그럴듯하게 이루어집니다. 마이크로컨트롤러의 개발 과정은 마이크로프로세서의 개발 과정과 비슷합니다.
마이크로컨트롤러는 버스 폭,메모리 구조 및 명령어 세트에 기초하여 분류될 수 있다. 버스 폭은 데이터 버스의 크기를 나타냅니다. 마이크로 컨트롤러는 버스 폭에 따라 8 비트,16 비트 또는 32 비트로 분류 할 수 있습니다. 더 높은 버스 폭은 더 나은 성과 수시로 귀착됩니다. 마이크로 컨트롤러는 메모리 구조에 따라 임베디드 메모리와 외부 메모리의 두 가지 유형으로 나눌 수 있습니다. 내장 메모리 마이크로컨트롤러의 경우,필요한 데이터 및 프로그램 메모리가 인터렉티브에 내장된다. 외부 기억 마이크로 제어기가 그(것)들에 끼워넣어진 프로그램 기억을 비치하지 않으며 동일을 위한 외부 칩을 요구하는 반면. 이제 하루,모든 마이크로 컨트롤러는 내장 메모리 마이크로 컨트롤러입니다. 명령어 집합을 기반으로 하는 분류는 마이크로프로세서의 분류와 유사합니다. 그 중 하나가 될 수 있습니다. 대부분의 마이크로컨트롤러는 80 개 이상의 명령어로 시스크 아키텍처를 따릅니다. 마이크로 컨트롤러는 컴퓨터 아키텍처를 기반으로 폰 노이만 과 하버드.
다음 표는 마이크로프로세서와 마이크로컨트롤러 간의 몇 가지 차이점을 요약한다.
 |
 |
| 마이크로프로세서는 중앙 처리 장치의 기능을 단일 집적 회로에 통합합니다. | 마이크로컨트롤러는 컴퓨터로 만들기 위해 프로세서와 일부 다른 구성요소가 있는 소형 컴퓨터로 간주될 수 있다. |
| 마이크로 프로세서는 주로 슈퍼 컴퓨터와 같은 크고 복잡한 시스템에 작은에서 범용 시스템을 설계하는 데 사용됩니다. | 마이크로 컨트롤러는 자동으로 제어되는 장치에 사용됩니다. |
| 마이크로 프로세서는 개인용 컴퓨터의 기본 구성 요소입니다. | 마이크로 컨트롤러는 일반적으로 임베디드 시스템에 사용됩니다. |
| 마이크로 프로세서의 계산 용량은 매우 높습니다. 따라서 복잡한 작업을 수행 할 수 있습니다. | 마이크로프로세서와 비교할 때 더 적은 계산 능력. 일반적으로 간단한 작업에 사용됩니다. |
| 마이크로 프로세서 기반 시스템은 수많은 작업을 수행 할 수 있습니다. | 마이크로컨트롤러 기반 시스템은 단일 또는 극소수의 작업을 수행할 수 있다. |
| 마이크로 프로세서에는 통합 수학 보조 프로세서가 있습니다. 부동 소수점을 포함하는 복잡한 수학적 계산은 매우 쉽게 수행 할 수 있습니다. | 마이크로 컨트롤러에는 수학 코 프로세서가 없습니다. 그들은 장치를 느리게 부동 소수점 계산을 수행하는 소프트웨어를 사용합니다. |
| 마이크로 프로세서의 주요 작업은 명령 사이클을 반복적으로 수행하는 것입니다. 여기에는 가져 오기,디코딩 및 실행이 포함됩니다. | 마이크로컨트롤러는 페치,디코드 및 실행 작업을 수행하는 것 외에도 명령 사이클의 출력을 기반으로 환경을 제어합니다. |
| 시스템(컴퓨터)을 구축하거나 설계하기 위해 마이크로 프로세서는 메모리(램 및 롬)및 입력/출력 포트와 같은 다른 구성 요소에 외부 적으로 연결되어야합니다. | 마이크로컨트롤러에는 메모리(램 및 롬)가 입출력 장치 및 타이머와 같은 다른 구성 요소와 함께 통합되어 있습니다. |
| 마이크로프로세서를 사용하여 구축된 시스템의 전체 비용은 높습니다. 이는 외부 구성 요소의 요구 사항 때문입니다. | 마이크로컨트롤러를 사용하여 구축된 시스템의 비용은 모든 컴포넌트를 쉽게 이용할 수 있기 때문에 더 적다. |
| 일반적으로 전력 소비와 방산은 외부 장치 때문에 높습니다. 따라서 외부 냉각 시스템이 필요합니다. | 전력 소비가 적습니다. |
| 클럭 주파수는 일반적으로 기가 헤르츠의 순서로 매우 높다. | 클록 주파수는 일반적으로 메가 헤르츠 순서입니다. |
| 명령 처리량은 인터럽트 대기 시간보다 우선 순위가 높습니다. | 반면 마이크로 컨트롤러는 인터럽트 대기 시간을 최적화하도록 설계되었습니다. |
| 몇 가지 비트 조작 명령 | 비트 조작은 마이크로 컨트롤러에서 강력하고 널리 사용되는 기능입니다. 그들은 수많은 비트 조작 지침을 가지고 있습니다. |
| 일반적으로 마이크로 프로세서는 다른 여러 구성 요소에 심각하게 의존하기 때문에 실시간 시스템에서 사용되지 않습니다. | 마이크로 컨트롤러는 단일 프로그래밍,자체 충분 및 작업 지향 장치이기 때문에 실시간 작업을 처리하는 데 사용됩니다. |
마이크로 프로세서와 마이크로 컨트롤러의 차이점을 제외하고 마이크로 프로세서는 마이크로 컨트롤러를 대체 할 수 없으며 그 반대의 경우도 분명합니다. 두 기술 모두 응용 프로그램에서 고유 한 사용 방식을 가지고 있습니다.